Diagnostiek
On-board diagnostics
On-board diagnostics (OBD) is in de auto-elektronica een term die verwijst naar het voertuigmanagementsysteem en de interface voor het uitlezen van informatie over verschillende delen van het voertuig.
Sinds de introductie in de jaren 80 varieert de hoeveelheid informatie beschikbaar via de OBD. De modernste OBD is versie OBD II.
OBD-1
OBD1 is in 1988 geïntroduceerd in de VS. OBD1 voertuigen moesten zijn uitgevoerd met een MIL (Malfunction Indicator Light). Storingscodes / DTC's (Diagnostic Trouble Codes) worden opgeslagen en kunnen worden uitgelezen. De California Air Resources Board (CARB) was verantwoordelijk voor de uitvoering van de OBD1 (aanvankelijk alleen van toepassing in Californië.) Voor OBD1 was er nog geen standaard waar de voertuigmerken aan moesten voldoen, zo waren er geen specificaties waar de diagnosestekker aan moest voldoen, fabrikanten maakten zelf een ontwerp voor de diagnosestekker. Hierdoor zijn er vele verschillende soorten diagnosestekkers die worden gebruikt voor OBD1. Ook voor de OBD1 codes waren er geen richtlijnen. De meeste voertuigmerken werken dan ook met hun eigen codes.
OBD-2
In de jaren 90 ontwikkelde de CARB emissieregels voor een 2e generatie On Board Diagnose, de OBD2 (OBD2 is gelijk aan de Europese regelgeving, EOBD). Alle personenwagens en lichte tot middelzware bedrijfswagens die in de VS werden verkocht moesten per 1-1-1996 aan de OBD2-standaard voldoen. Het "System Diagnose Committee" van de "Society of Automotive Engineers" (SAE), die reeds in 1987 was opgericht, kwam ten aanzien van de OBD2 met een lijst van SAE standaardaanbevelingen die door de industrie moesten worden overgenomen.
De OBD-II heeft een gestandaardiseerde hardware interface: de vrouwelijke 16-pin (2x8) J1962 connector. In tegenstelling tot de OBD-I connector, is de OBD-II connector in principe altijd bevestigd aan de bestuurderszijde van de passagiersstoel naast de middenconsole. De SAE definieert de pinout van de connector als volgt:
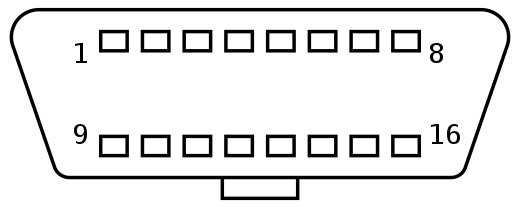
- +15
- Bus positive Line of SAE-J1850
- -
- Chassis ground
- Signal ground
- Controller Area Network (CAN) high (ISO 15765-4 and SAE-J2234)
- K line of ISO 9141-2 and ISO 14230-4
- -
- -
- Bus negative Line of SAE-J1850
- -
- -
- -
- CAN low (ISO 15765-4 and SAE-J2234)
- L line of ISO 9141-2 and ISO 14230-4
- Accuspanning
CAN bus
Het Controller Area Network (CAN) is een standaard voor een seriële databus, die oorspronkelijk is ontwikkeld door Robert Bosch GmbH, vanaf 1983 tot 1986, om elektronische sturingseenheden in voertuigen aan elkaar te koppelen.
CAN is expliciet ontworpen voor omgevingen met veel elektromagnetische storingen en maakt gebruik van twee differentieel aangedreven lijnen; de betrouwbaarheid van de signaaloverdracht kan verder worden verhoogd door het gebruik van twisted pair-verbindingen.
De eerste markt voor CAN was de automobielsector. Het systeem werd voor het eerst gebruikt in de Mercedes S-klasse in 1990, maar ondertussen is CAN ook doorgedrongen in andere embedded toepassingen, zoals machinesturingen en robots.
Gegevensoverdracht tot 1 Mbit/s (een miljoen bits per seconde) is mogelijk voor een kabellengte onder de 40 meter. Langere netwerken zijn mogelijk als de maximum bitsnelheid wordt aangepast; bijvoorbeeld, tot 250 kbit/s (250 duizend bits per seconde) voor een lengte van 250 meter.
Een CAN-bus maakt realtime communicatie mogelijk: iedere node van het CAN-netwerk heeft een vaste prioriteit en de boodschap van de node met de hoogste prioriteit krijgt voorrang.