De eerste stappen
Alles wat u weten moet om een stappenmotor aan te sturen
Over stappenmotoren is in Elektuur al heel wat geschreven, de laatste keer nog in december 2003 en januari 2004. Het verschil met vorige publicaties is dat we het in dit artikel heel praktisch houden, we gaan niet op de theorie in. Wilt u meeer van de achtergrond weten, kijk dan in voorgaande artikelen uit de literatuurlijst aan het einde van dit artikel.
Om een onbekende motor aan het draaien te krijgen, hoeft u eigenlijk maar twee dingen te doen: uitzoeken welke eigenschappen uw stappenmotor heeft en dan de bijhorende elektronica kiezen. Met behulp van dit artikel zult u merken dat dit niet erg moeilijk is. We beginnen met een driestappenplan om de belangrijkste eigenschappen van een motor te bepalen. In stap 1 gaat het erom te bepalen of u een bipolaire of unipolaire motor heeft.
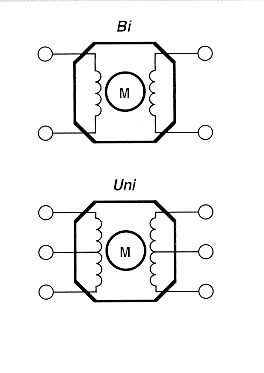
Figuur 1. Bipolaire of unipolaire motor?
1. Type motor
Een bipolaire motor (figuur 1) heeft wikkelingen waardoor de stroom afwisselend de ene kant en de andere kant op loopt. Dit wekt een magnetisch veld op dat eveneens van richting wisselt, waardoor de motor gaat bewegen. De wikkeling van dit type motor heeft twee aansluitingen. De stuurelektronica moet de spanning voor de wikkeling dus steeds ompolen. Daarvoor is een brugschakeling met 4 transistors nodig.
Een unipolaire motor heeft een wikkeling met een middenaftakking. Deze wikkeling heeft dus drie aansluitingen. De middenaftakking moet met de voedingsspanning verbonden zijn. Leggen we nu het begin aan massa (en sluiten het einde nergens op aan), dan loopt er stroom door eerste helft van de wikkeling. Leggen we het einde aan massa (en laten het begin open), dan gaat er door de tweede helft van de wikkeling stroom lopen. Omdat de stroom in de tweede helft van de wikkeling de andere kant op loopt, is het magnetische veld ook omgepoold. De stuurelektronica kan dus eenvoudiger zijn, we hoeven immers slechts of het begin, of het einde naar massa te schakelen. Twee transistors zijn hiervoor voldoende.
Een stappenmotor heeft tenminste twee paren wikkelingen, dus 2x2 of 2x3 aansluitingen. Heeft een motor 4 aansluitdraden, dan is het bijna 100% zeker een bipolaire. En als er 5 of 6 aansluitingen zijn, dan is het bijna 100% zeker een unipolaire. Het is niet ingewikkelder dan dat. Heeft een motor meer aansluitingen, dan heeft u een probleem. Er blijft dan niets anders over dan openschroeven en hopen dat u kunt zien hoe de bedrading intern in elkaar zit. Meestal leidt dit niet tot resultaat. Gebruik dan gewoon een andere motor!
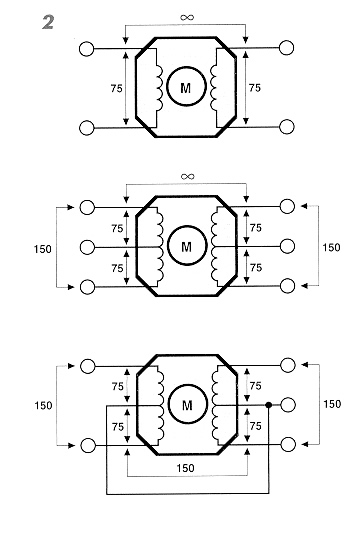
Figuur 2. Het bepalen van de aansluitingen.
2. Aansluitdraden
Wanneer u het type motor heeft bepaald, is het tijd om uit te zoeken welke aansluitdraden bij welke wikkeling horen. Meet de weerstand tussen de aansluitingen met behulp van een universeelmeter. Loop alle combinaties na en schrijf de resultaten op. Tussen begin en einde van een wikkeling meet u een waarde die in Ohm kan worden uitgedrukt. Van de aftakking naar begin of einde is de weerstand de helft van de waarde die tussen begin en einde is gemeten. Tussen de wikkelingen meet u oneindig of Mega-Ohms. Zo bepaalt u welke twee of drie aansluitingen bij een wikkeling horen. Als de unipolaire motor een gemeenschappelijke middenaftakking heeft (5 draden), is het helaas niet mogelijk er achter te komen welke aansluitingen bij welke wikkelingen horen. De middenaftakking heeft in dat geval dezelfde weerstand naar de overige vier draden. Maar zoals verderop zal blijken, hebben we daar ook een oplossing voor bedacht.
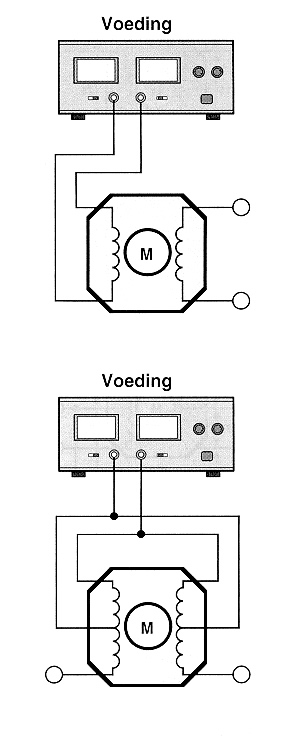
Figuur 3. Wat is de maximale voedingsspanning?
3. Voedingsspanning
Als het er niet op staat, is er geen andere mogelijkheid om aan de motor te zien voor welke spanning hij gemaakt is. Vaak weet u wel met welke spanning hij gevoed werd in de schakeling waar u hem uit heeft gehaald. Zo zal een stappenmotor uit een floppy op 5 of op 12 V werken. Heeft u helemaal geen idee, dan kunt u het op de volgende wijze schatten: Sluit bij een bipolaire motor op een van de wikkelingen een gestabiliseerde voeding aan. Bij een unipolaire motor sluit u twee wikkelingen aan zoals in figuur 3. Zet er enkele volts op en wacht een paar minuten. Voel aan de motor of hij warm wordt. Zo nee, verhoog de spanning en controleer na 5 minuten de temperatuur weer. Herhaal dit totdat de motor zó warm is, dat u hem nog net kunt aanraken. U heeft dan bij benadering de maximale spanning voor deze motor gevonden.
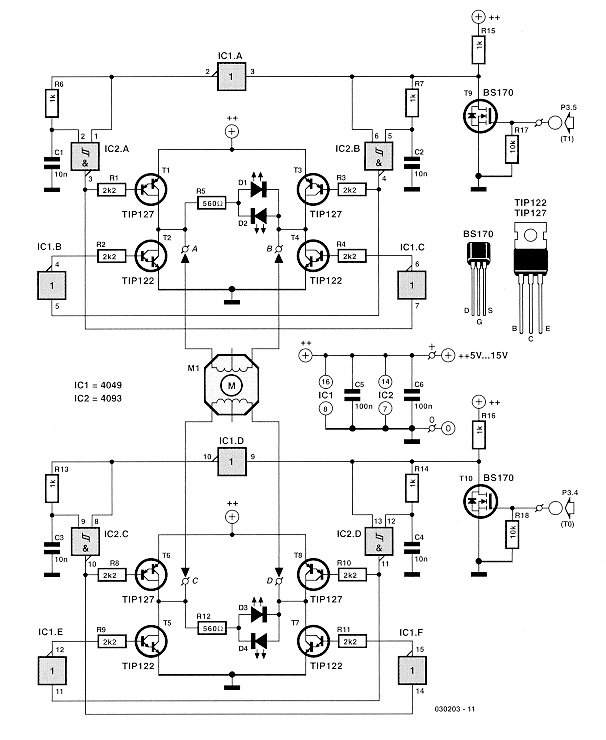
Figuur 4. Schema van de stappenmotorsturing.
Hardware
Nu de voornaamste eigenschappen van de motor zijn bepaald, is het moment gekomen om de juiste hardware uit te zoeken. Geen angst, ook hier gaan we in enkele eenvoudige stappen te werk. Onze stuurschakeling heeft enkele beperkingen. Zo is de maximaal mogelijke spanning 18 V (liever wat minder, bijvoorbeeld 15 V) en de maximale stroom door de motor 2 Ampère. Wanneer uw motor een hogere spanning of een grotere stroom nodig heeft, dan kunt u hem met deze schakeling niet aansturen. Hoeveel stroom de motor verbruikt, kunt u tijdens de voorgaande test aflezen op de voeding of uitrekenen: motorspanning gedeeld door weerstand van de wikkeling. Kies de voedingsspanning voor de schakeling gelijk aan de gewenste motorspanning.
De schakeling uit figuur 4 bestaat uit een brug, zodat hiermee bipolaire motoren kunnen worden aangestuurd. Het is echter ook mogelijk met dezelfde print unipolaire motoren aan te sturen. In dat geval worden de 'bovenste' transistoren niet gemonteerd. In plaats hiervan monteert u een diode in sperrichting tussen collector van de overgebleven transistoren en de positieve voedingsspanning. Dus de kathode, de kant met het streepje, komt aan de plus. De andere kant telkens aan de aansluitingen van de motor A, B, C en D.
Vergeet bij een unipolaire motor verder niet de middenaftakking aan de plus van de voeding te leggen. Het uitgeklede schema is te downloaden op de website van Elektuur.
De volgende vraag is welke halfgeleiders u kunt gebruiken. Welnu, zowel transistors als FET's zijn mogelijk. Transistors zijn vaak wat goedkoper en robuuster, maar hebben wat meer verliezen. In feite gebruiken we hier overigens geen transistoren, maar darlingtons. Dat zijn twee transistoren achter elkaar in één behuizing. Ze gedragen zich net als gewone transistoren, maar dan met een grotere versterking, namelijk ongeveer 1000 maal. Nadeel echter is een spanningsverlies van ongeveer 0,8 V.
FET's zijn meestal de betere keuze, maar let even op: P-FET's (voor de 'bovenste' halfgeleiders van de brug) zijn wat lastiger te vinden. De spanningsverliezen zijn minimaal en daardoor is de versie met de FET's speciaal geschikt voor 5-V-motoren. Bij de transistorversie blijft er immers maar 5 - 0,8 - 0,8 = 3,4 V over voor de motor...
Mogelijk dat er bij het kopen van de FET's nog iemand roept dat u zogenaamde logic-FET's nodig heeft. Deze FET's kunnen toe met een lagere stuurspanning op de gate. Logic-FET's mag u wel gebruiken, maar nodig is het niet, zoals in figuur 5 te zien is. Bij 5 V voeding kunt u ook met een 'gewone'FET meer dan 5 A schakelen en dat is dus ruim voldoende. Voor de P-FET 9530 is dit wat ongunstiger, maar 2 A is nog altijd mogelijk.
De keuze van zowel de darlingtons als de FET's is helemaal niet kritisch. Kunt u de typen uit de onderdelenlijst niet krijgen of heeft u nog wat in uw verzameling liggen, hou dan een minimale spanning van 50 V aan en een minimale stroom van 4 A. Er zijn erg veel typen die, aan deze specificaties voldoen.
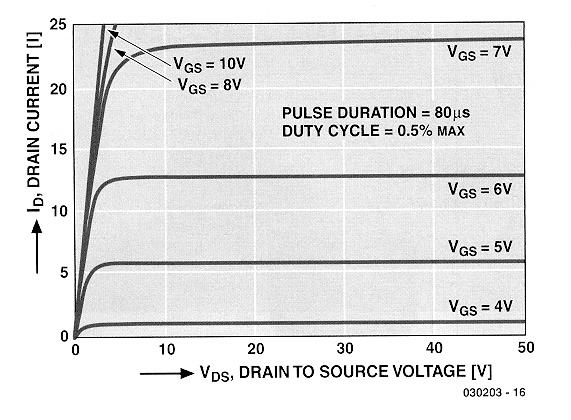
Figuur 5. Ook bij 5 V gate-spanning (VGS) kunnen de meeste FET's gemakkelijk 2 Ampère schakelen.
Werking
De stuurschakeling voor de stappenmotor bestaat uit twee identieke helften, we hoeven daarom maar een helft te bespreken. De signalen op de ingang worden met behulp van T9 omgezet in een bloksignaal met een amplitude die gelijk is aan de voedingsspanning van de schakeling. Dit is nodig omdat het stuursignaal in bijna alle gevallen een kleinere amplitude heeft, bijv. 3,3 of 5 V. T9 past de spanningen dus op elkaar aan.
Vervolgens gaat het signaal naar NAND-poort IC2b, eenmaal rechtstreeks en eenmaal 10 µs vertraagd via R7/C2. Dat is natuurlijk niet voor niets gedaan, de truc hierbij is dat een overgang van '1' naar '0' op de ingang ogenblikkelijk wordt doorgegeven, terwijl een '0' naar '1' overgang vertraging oploopt. Via IC1a en IC2a gebeurt dit nog eens, maar nu op de andere flank omdat IC1a het signaal eerst heeft geïnverteerd. Deze hele exercitie is nodig omdat de transistors op deze manier wel onmiddellijk uitschakelen, maar vertraagd inschakelen. Zo wordt voorkomen dat twee transistors boven elkaar gelijktijdig geleiden en daardoor de voedingsspanning kortsluiten. Laat C1/C2 maar eens weg, als u durft: Er lopen dan stroompieken van een paar Ampère!
Bij normaal bedrijf echter geleiden steeds twee kruislings geplaatste transistoren. Bijvoorbeeld wanneer T1 en T4 geleiden, zal punt A positief zijn en punt B met massa zijn verbonden. LED D1 licht op en er zal ook stroom lopen door de wikkeling van de aangesloten stappenmotor. Geleiden daarentegen T2 en T3, dan is de polariteit omgekeerd en loopt de stroom door de stappenmotor de andere kant op. Nu licht D2 op.
Op het moment van schakelen (als de transistors uit geleiding gaan) ontstaan er spanningspieken omdat de stappenmotorwikkeling als een spoel (zelfinductie) werkt. Deze pieken worden gedempt door de LED's tezamen met R5. U mag deze componenten dus niet weglaten. Bovendien hebben zowel de darlingtons als de FET's ingebouwde beschermingsdioden!
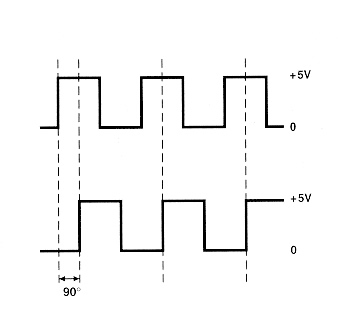
Figuur 6. Twee bloksignalen laten een stappenmotor draaien.
Aansturing van de schakeling
Het stappenmotorprintje heeft twee ingangen. Die worden verbonden met ons 89S8252 flash-board (zie literatuurverwijzing aan het einde van dit artikel). Om een stappenmotor te laten draaien zijn twee blokgolven nodig die 90 graden ten opzichte van elkaar verschoven zijn. Zijn de golven -90 graden verschoven, dan draait de motor de andere kant op (zie figuur 6). De software die op het flash-board draait, genereert deze blokgolven. Figuur 7 toont hoe u het board op de stuurschakeling aansluit. Met drukknoppen op het board kan het toerental worden gevarieerd en zal de motor langzamer of sneller draaien.
Het ingangscircuit met de FET's T9 en T10 is toegevoegd om er voor te zorgen dat de blokgolf uit het flash-board met een amplitude van 5 V naadloos aansluit op de (meestal) hogere voedingsspanning van de stappenmotorsturing. De software - te downloaden op de website van Elektuur - is een demo en bedoeld om u met deze techniek kennis te laten maken, zodat u ook zelf programma's kunt gaan schrijven.
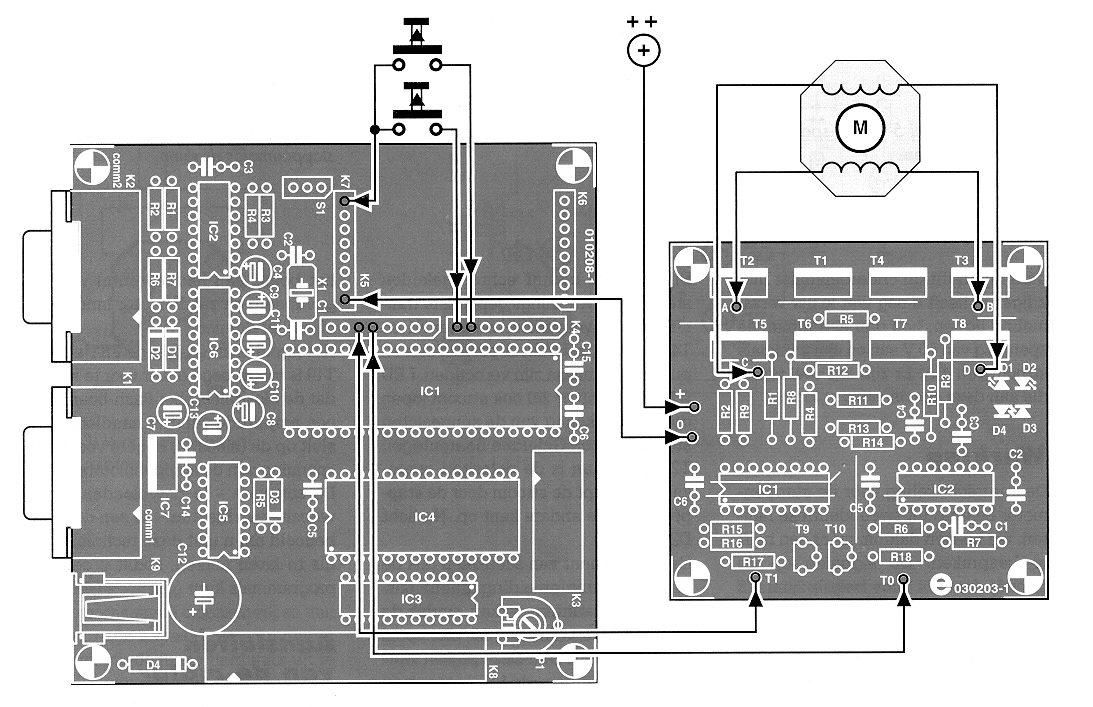
Figuur 7. Zo sluit u het flash-board aan op de print van de stappenmotorsturing.
Aansluiten van de motor
Ook hier vertellen we kort en krachtig wat u moet doen. Bij een bipolaire motor met 4 draden sluit u een wikkeling aan op A-B en de andere wikkeling op C-D. Vindt u dat de motor de verkeerde kant op draait, wissel dan A met B.
Bij een unipolaire motor met 6 draden sluit u de middenaftakkingen aan op de + van de voeding. Het begin en einde van de ene wikkeling wordt aangesloten op A en B en het begin en einde van de andere wikkeling op C en D. Draait de motor de verkeerde kant op, wissel dan A met B. Bij een unipolaire motor met 5 draden wordt de gezamenlijke middenaftakking aangesloten op de + van de voeding en de 4 uiteinden van de wikkelingen willekeurig op A, B, C en D. Als u geluk hebt, zal de motor draaien. Maar de kans is het grootst dat de motoras alleen maar een beetje heen en weer staat te trillen. Hier komt plan B in werking: Verwissel op goed geluk de aansluitingen, totdat de motor wel draait! Er kan niets stuk gaan, de motor loopt geen schade op. Schakel wel steeds even de voedingsspanning uit. Wissel A-B en schakel de voeding weer in. Draait de motor nog niet, wissel A en C. Als er nog steeds geen resultaat is, wissel dan weer A-B.
Meer over de bijbehorende programmatuur vindt u elders in dit blad in het artikel 'Software? Dat doen we zelf!'.
Literatuur:
- Werken met stappenmotoren, deel 1, Elektuur december 2003
- Werken met stappenmotoren, deel 2, Elektuur januari 2004
- 89S8252 Flash-boord, Elektuur december 2001
Internet:
De uitgeklede versie van het schema, evenals de print-layout en de software voor het flashboord zijn te downloaden op: www.elektor.nl.
Ontwerp: Horst Hubert
Tekst: Karel Walraven