Stappenmotor met uln2003

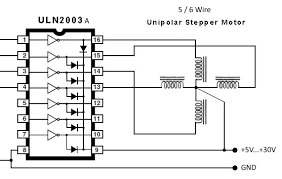
ULN2003 driver
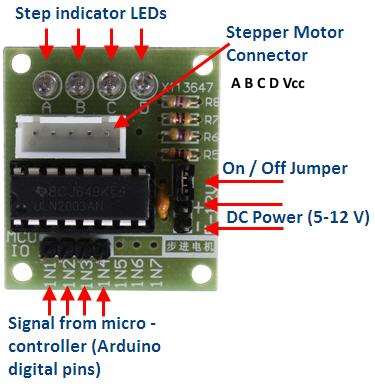
De vrijloop diodes zitten in de uln2003 met de kathodes verbonden met de COM. Bij gebruik van inductieve belastingen hoeft er geen vrijloop diode geplaatst te worden. Men verbind de COM met de +Vcc voor de motoren.
De ingangen worden op de digitale uitgangen van de Arduino aangesloten. De driver kan aan de uitgang 5 V tot 12 V belastingen aan bij 500 mA.
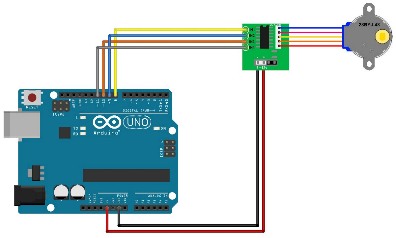
Aansluiten op de Uno.
Zie verder.
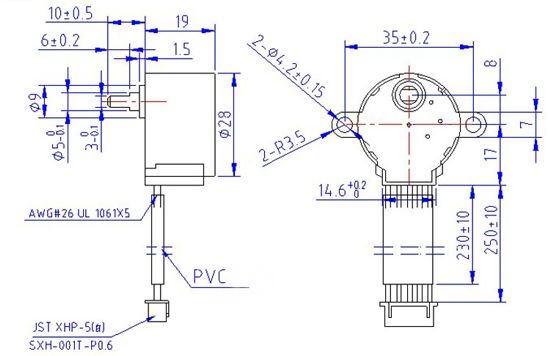
Stappenmotor
In deze set wordt de 28BYJ-48 stappenmotor gebruikt welke een ingebouwde vertraging van 1:64 heeft. Dit is een 5 V type. Er is ook een 12 V versie te koop.
De motor is van het type 4 fase. Er is een gemeenschappelijke draad welke met de voedingspanning wordt verbonden.
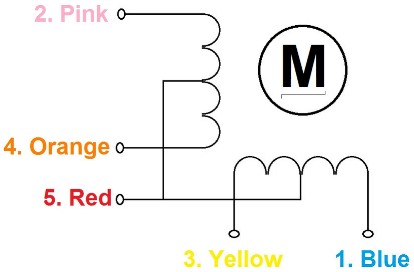
Schema van de stappenmotor.
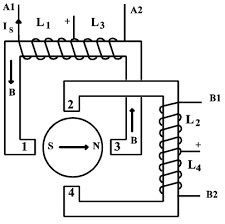
Aansturing
De controller stuurt een 4 fase signaal naar de driver.
Technische details 28BYJ-48 5V
| Rated voltage | 5 VDC |
| Number of Phase | 4 |
| Speed Variation Ratio | 1 / 64 |
| Stride Angle | 5.625° / 64 |
| Frequency | 100 Hz |
| DC resistance | 50 Ω ± 7 % (25 °C) |
| Idle In-traction Frequency | > 600Hz |
| Idle Out-traction Frequency | > 1000Hz |
| In-traction Torque | > 34.3 mN.m (120Hz) |
| Self-positioning Torque | > 34.3 mN.m |
| Friction torque | 600-1200 gf.cm |
| Pull in torque | 300 gf.cm |
| Insulated resistance | > 10 MΩ (500V) |
| Insulated electricity power | 600 VAC / 1 mA / 1 s |
| Insulation grade | A |
| Rise in Temperature | < 40 K (120 Hz) |
| Noise | < 35 dB (120 Hz, No load, 10 cm) |
Stappen
Full steps
Bij full steps worden vier combinaties gebruikt per cyclus.
| Normal | Alternate (more torque) | |||||||
|---|---|---|---|---|---|---|---|---|
| Index | 1 | 2 | 3 | 4 | 1 | 2 | 3 | 4 |
| 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 1 |
| 2 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 1 |
Half steps
Bij half steps worden acht combinaties gebruikt per cyclus.
| Index | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 0 | 1 | 0 |
| 6 | 0 | 0 | 1 | 1 |
| 7 | 0 | 0 | 0 | 1 |
| 8 | 1 | 0 | 0 | 1 |