GTFM, ein frequenzökonomisches Modulationsverfahren zur digitalen Datenübertragung
Mit der GTFM steht ein leistungsfähiges Modulationsverfahren zur Verfügung, das digitale Datenübertragung über einen Funkkanal erlaubt, der eine Bandbreite von nur doppelter Datenrate belegt. Im folgenden werden zunächst die Merkmale dieses Verfahrens im Vergleich zur FSK aufgezeigt. Nach der Erläuterung der Sende- und Empfangsprinzipien wird eine der möglichen Realisierungen einer Obertragungsstrecke vorgestellt und bis auf Blockschaltbildebene näher beschrieben.
1. Einleitung
Dabei weist GTFM als eine Art der Winkelmodulation auch deren Vorzüge auf:
- konstante Amplitude und damit mögliche nichtlineare Leistungsverstärkung (Klasse-C-Verstärker) sowie Begrenzung im Empfänger,
- gutes Bitfehlerverhalten in Abhängigkeit vom Signal-/Rausch-Verhältnis,
- zur analogen Frequenzmodulation vergleichbare Resistenz gegen Gleich- und Nachbarkanalstörungen und
- bei geeigneter Wahl der Empfängerstruktur (Diversity) gutes Bitfehlerverhalten im Funkfeld bei bewegter Mobilstation.
Insbesondere die spektralen Eigenschaften lassen sich nur über einen streng kontrollierten Phasenverlauf erreichen, was auch in der Bezeichnung dieses übertragungsverfahrens Generalized Tamed Frequency Modulation (GTFM) zum Ausdruck kommt.
2. Beschreibung des Modulationsvertahrens
2.1. Von der FSK zur GTFM
Ein winkelmoduliertes Signal S(t) = A × cos(Ω × t + Φ(t) + Φ0) überträgt die Information im Argument der Sinus- oder wie hier Cosinusschwingung. ft = Q/2π stellt dabei die Trägerfrequenz des Signals dar, während mit mo eine beliebige Startphase berücksichtigt wird.
Im Fall der FSK-Modulation nimmt der Modulationsterm Φ(t) der Phase die Form Φ(t) = 2 × π × Δf × Dn × t an, wobei Dn je nach Inhalt des nten Datenbits -1 oder +1 wird. Der Frequenzhub Δf in Kilohertz steht mit der ebenfalls gebräuchlichen Frequenzshift als über die Beziehung Δfs = 2 × Δf in Zusammenhang.
Trägt man die Phase Φ(t) für eine gegebene Datenfolge in einem Diagramm (Abb. 1) über der Zeit auf, wird deutlich, daß sich der Phasenverlauf aus Geraden-stücken zusammensetzt. Das Vorzeichen der Geradensteigung wird vom Dateninhalt bestimmt, der Betrag der Steigung ist durch den Frequenzhub festgelegt.
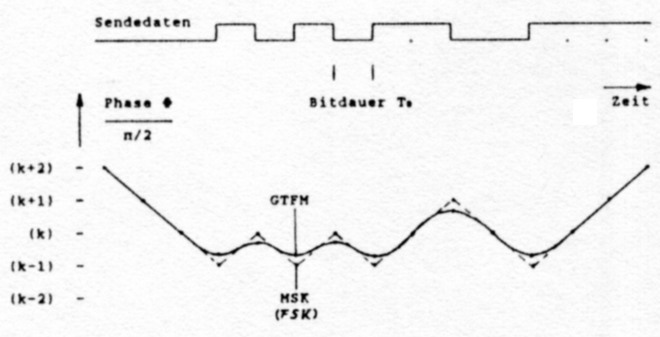
Abb. 1: Verlauf der Trägerphase m in Abhängigkeit der Sendedaten für die Modulationsverfahren MSK und GTFM.
Im allgemeinen ist der Hub Δf der FSK frei wählbar, jedoch verschlechtert kleinerer Hub bei gleicher Datenrate fB (Bits/ Sekunde) den Störabstand. Andererseits wird mit zunehmendem Hub das Spektrum verbreitert.
Einen Kompromiß zwischen Störabstand und spektralen Eigenschaften erhält man mit einem Frequenzhub Δf, der genau ein Viertel der Datenrate fB beträgt: Δf = fB/4. Dieser Spezialfall der FSK ist unter den Namen MSK (Minimum Shift Keying) oder FFSK (Fast Frequency Shift Keying) bekannt. Innerhalb einer Bitdauer TB = 1/fB ändert sich die Phase Φ(t) unter diesen Voraussetzungen um ΔΦ = ±π/2, je nach Dateninhalt.
Das sehr breite Spektrum dieses übertragungsverfahrens ist in Abb. 2 dargestellt. Verantwortlich für die nur sehr langsam abfallende spektrale Leistungsdichte sind im wesentlichen die Unstetigkeitsstellen an den Bitgrenzen.
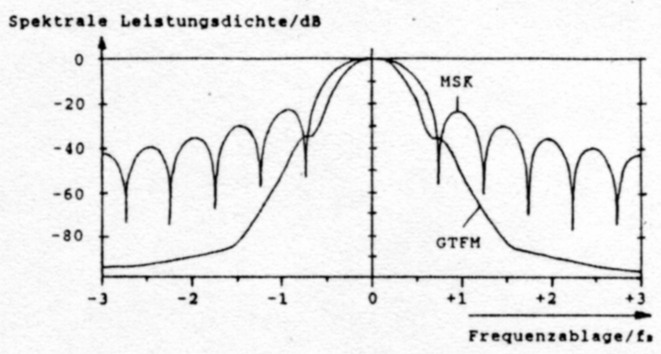
Abb. 2: Spektren von MSK und GTFM.
Zu den in Abb. 2 gezeigten Spektren ist noch anzumerken, daß es sich um über lange Zeit gemittelte Spektren handelt. Die Kurzzeitspektren von FSK (MSK) und GTFM sind unsymmetrisch. Insbesondere kann über mehrere Bitperioden hinweg ein um den Hub M von der Spektrumsmitte verschobenes Signal gesendet werden.
Zwei Maßnahmen beseitigen die Unstetigkeitsstellen im Phasenverlauf,und führen zu dem in Abb. 2 ebenfalls gezeigten Spektrum der GMSK (Gaussian filtered MSK) oder der praktisch identischen GTFM:
- Es werden neben ±π/2 vier weitere Phasenänderungen ΔΦ während einer Bitperiode zugelassen: ±0,12π und ±0,31π.
- Der Phasenverlauf innerhalb der Bitperiode wird durch ein Filter H(f) so kontrolliert, daß die Trägerphase an den Bitgrenzen stetig weiterläuft.
Die Entscheidung über die in der näch4 sten Bitperiode zu sendende Phasenänderung Am wird nun nicht mehr nur vom Dateninhalt des aktuellen Bits Dn abgeleitet, vielmehr werden das vorhergehende Bit Dn_t sowie das folgende Bit Dn+1 mit berücksichtigt. Wie die einzelnen Bits die Phasenänderung beeinflussen, ist aus Tabelle 1 ersichtlich.
| Dn-1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 |
| Dn | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 |
| Dn+1 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
| ΔΦ/π | -0,5 | -0,31 | -0,12 | +0,31 | -0,31 | +0,12 | +0,31 | +0,5 |
2.2. Modulationsfilter
Die Auswahl der notwendigen Phasenänderung Am kann sehr einfach mit einem dreistufigen Transversalfilter realisiert werden. Dazu werden die Daten im Bittakt durch ein dreistufiges Schieberegister geschoben, dessen Ausgänge mit entsprechenden Wichtungsfaktoren multipliziert und dann addiert werden:
ΔΦ =(a × Dn-1 + B × Dn+a × Dn+1) × π / 2Abb. 3 zeigt diesen Teil des Modulators. Dabei müssen die Koeffizienten die Bedingung B + 2a = 1 erfüllen, um ΔΦ auf ±π/2 zu begrenzen. Die Übertragungsfunktion des Transversalfilters wird durch S(f) = B + 2a × cos(2πfTB) beschrieben.
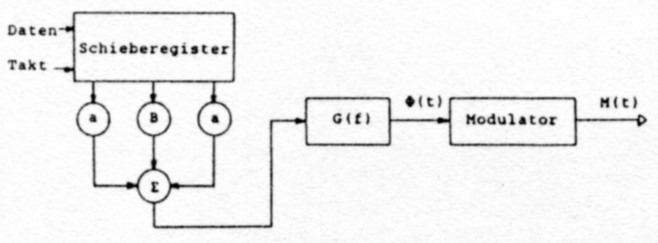
Abb. 3: Struktur das Modulationsfilters H(f).
Das anschließende Tiefpaßfilter G(f) glättet den Verlauf der Phase während der Bitdauer. Seine übertragungsfunktion lautet:
G(f) = W(f) (πfTB/sin(πfTB))W(f) beschreibt darin ein "raised cosine Filter" mit dem Parameter r (Rolloff-Faktor: 0 ≤ r ≤ 1), dessen Verlauf der Übertragungsfunktion in Abb. 4 dargestellt ist. Als stückweise definierte Funktion ausgedrückt, lautet W(f):
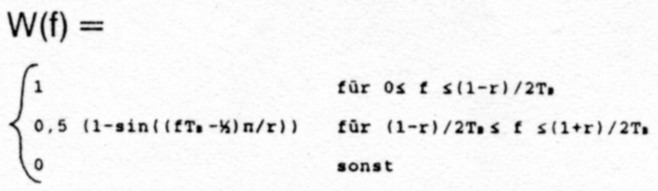
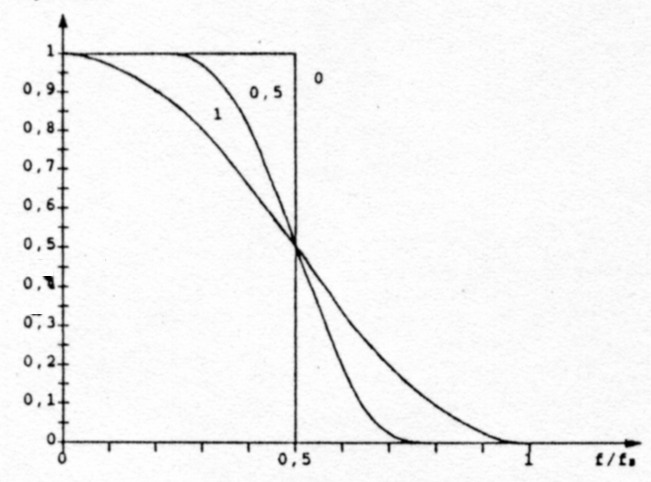
Abb. 4: Übertragungsfunktion das Raised-CosineFilters für drei verschiedene Rolloff-Faktoren r.
Die Übertragungsfunktion des gesamten Modulationsfilters H(f) ergibt sich aus dern Produkt der übertragungsfunktionen beider Teilfilter S(f) und G(f).
Da im Gesamtfilter H(f) die beiden Parameter Rolloff-Faktor r und Wichtungsfaktor B (der zweite Wichtungsfaktor a ist ja über die Beziehung B + 2a = 1 festgelegt) noch frei wählbar sind, beschreibt H(f) zunächst eine ganze Klasse von ähnlichen Modulationssignalen. Die Optimierung beider Parameter auf größten Störabstand im Empfänger führt zu B = 0,62 und r = 0,36.
Mit diesen Werten hat das Modulations-filter H(f) die Impulsantwort h(t), die in Abb. 5 dargestellt ist. Deutlich ist zu erkennen, daß sich die Impulsantwort über mehrere Taktperioden erstreckt. Für t > 3TB/2 ist die Amplitude des Impulses bereits auf sehr kleine Werte abgeklungen, und h(t) geht für die Zeitpunkte t = k × TB + TB/2 (k = 1, 2, ...) durch Null. Diese Eigenschaften spielen beim Empfang und der späteren Realisierung eine große Rolle.
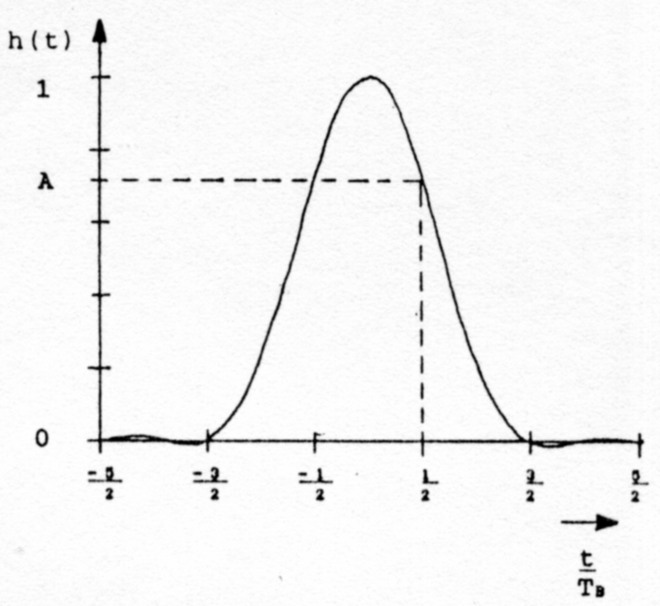
Abb. 5: Impulsantwort des GTFM-Modulationsfilters H(f).
2.3. Modulator
Prinzipiell kann die Modulation der Trägerphase mit den aus der analogen Phasen- und Frequenzmodulation bekannten Verfahren erfolgen. Jedoch werden die Schaltungen zum Einstellen und überwachen des Frequenzhubes auf exakt ein Viertel der Datenrate sehr umfangreich und schwierig abzugleichen.
Wesentlich eleganter ist der Einsatz eines Quadraturmodulators, wie er bei der SSB-Erzeugung nach der Phasenmethode verwendet wird. Dieser Modulator (Abb. 6) besteht aus zwei Mischern, deren Ausgangssignale subtrahiert werden. Die Ansteuerung der Mischer erfolgt an den LO-Eingängen mit zwei um 90° phasenverschobenen Trägersignalen. An den DC-Eingängen wird den Mischern der Sinus beziehungsweise der Cosinus der Modulationsphase m angeboten.
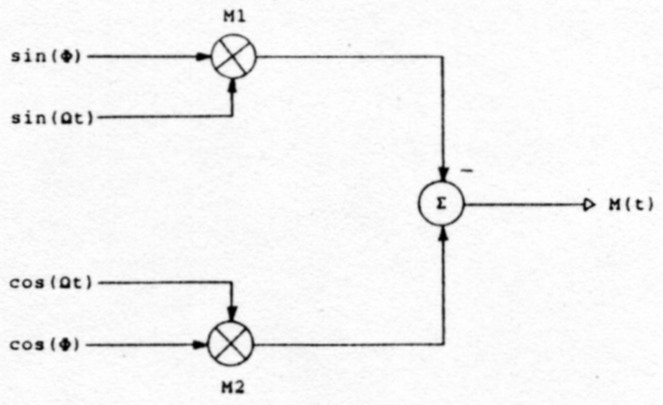
Abb. 6: Struktur des Quadraturmodulators.
Die beiden Mischer liefern dann die einzelnen Teilbeiträge M1 = A × sin(Φ) × sin(Ωt) und M2 = A × cos(Φ) × cos(Ωt). Umformung über trigonometrische Formeln und anschließende Differenzbildung M2 - M1 liefert das Ausgangssignal M:
M = M2 - M1 = A/2 × cos(Ωt + Φ).
M beschreibt das gewünschte phasenmodulierte Signal mit konstanter Amplitude (A hängt nicht von den Modulations-signalen ab).
2.4. Empfang von GTFM-Signalen
2.4.1. Empfangsprinzipien
Für Amateurfunkzwecke kommen aus Aufwandsgründen nur zwei Empfangsprinzipien in Frage:
- Beim kohärenten Empfänger wird der Quadraturmodulator nach Abb. 6 in umgekehrter Richtung betrieben. Aus den beiden entstehenden Basisbandsignalen werden die Daten von einem Auswerter zurückgewonnen. Die Schwierigkeit bei diesem Prinzip liegt im Bereitstellen des Trägers, der von einer Regeneratorschaltung aus dem unsymmetrischen GTFM-Signal abgeleitet werden muß. Solche Regeneratoren haben entweder eine lange Einschwingzeit oder schlechte Rauscheigenschaften. Dieses Verhalten macht sie für einen getasteten oder mobilen Betrieb weniger geeignet.
- Der nichtkohärente Empfänger werdet das Basisbandsignal a(t) aus, das durch Demodulation mit einem Frequenzdiskriminator entsteht. Abb 7 zeigt dieses Basisbandsignal, das wegen seiner Form auch Augenmuster genannt wird.
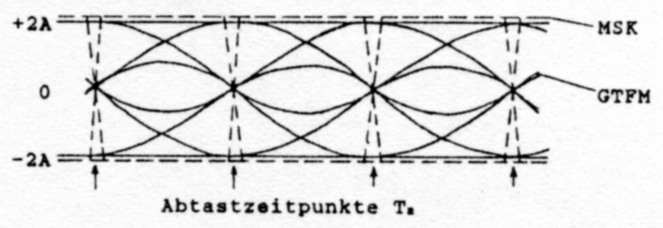
Abb. 7: MSK- und GTFM-Signale nach der Demodulation mit einem Frequenzdiskriminator (Augenmuster).
Diese Darstellung entsteht, wenn alle übergangsfunktionen auf dem Oszilloskop übereinandergeschrieben werden. Zweckmäßigerweise wird dabei das Oszilloskop vom Takt auf der Senderseite getriggert und der Sender mit Zufallsdaten inodulie, ..
Durch einfache Schwellenentscheidungen mit Kondensatoren kann aus diesem Signal der Dateninhalt wiedergewonnen werden.
Der in unserer Strecke eingesetzte Empfänger arbeitet nach der zweiten Methode. Jedoch wird statt der einfachen Kornparatorentscheidung ein sogenannter Maximum Likelihood Sequence Estimator (MLSE) zur Datenrückgewinnung eingesetzt. Dieser Auswerter nutzt die Signalzusammenhänge zwischen zwei aufeinanderfolgenden Augenabschnitten aus, was eine Empfindlichkeitssteigerung von etwa 2 dB gegenüber der Komparatorentscheidung bringt.
2.4.2. Aufbau des Augendiagramms
Zu den Zeitpunkten Tn entsteht im Augenrnuster ein dreistufiger Abschnitt a(Tn) mit maximaler öffnung. Dieser dreistufige Augenteil bildet genau die Grenze, an der auf der Senderseite der Wechsel von Bit n-1 auf Bit n stattfindet. Damit ist das Augenmuster bei der GTFM urn eine halbe Bitdauer gegenüber dem der MSK verschoben.
Mit guter Näherung können die drei Zustände an dieser Stelle Tn durch die überlagerung der beiden aneinandergrenzenden Datenbits dargestellt werden:
an = a(Tn) = Dn-1 × h(T/2) + Dn × h(T/2) = Dn-1 × A + Dn × A.
h(T/2) ist darin der Wert der Impulsantwort (Abb. 5) des Modulationsfilters H(f) zur Zeit T/2 und geht hier nur als Faktor ein. Vereinfacht kann dann an = bn-1 + bn geschrieben werden. bn-1 und bn nehmen je nach Dateninhalt die Amplitudenwerte A = -h(T/2) oder +A = h(T/2) an. In an eingesetzt ergeben sich so die Zustände der dreistufigen Augenöffnung:
| bn | -A | +A | |
|---|---|---|---|
| bn-1 | |||
| -A | -2A | 0 | |
| +A | 0 | +2A |
Auf der Empfangsseite wird im allgemeinen nicht der gesendete Wert an, sondern der mit Rauschen n(t) behaftete Augenwert xn = an + nn detektiert.
Das dreistufige Augendiagramm wird einmal je Bittakt zu den Zeitpunkten Tn abgetastet. Aus der dabei anfallenden Folge von Abtastwerten x, bestimmt der Maximum-Likelihood-Auswerter eine Datenfolge d", die mit der gesendeten Datenfolge D" die größte übereinstimmung aufweist.
Ein Vergleich der Augendiagramme von MSK und GTFM zeigt, daß bei der GTFM wesentlich größere Anorderungen an die Konstanz des Abtastzeitpunktes gestellt werden. Steht bei der Mim,( fast die gesamte Bitperiode mit gleichbleibender Augenöffnung zur Verfügung, so nimmt bei der GTFM die Augenöffnung vor beziehungsweise nach dem Abtastzeitpunkt sehr schnell ab. Ein zu großer Jitter des Abtastimpulses hat damit ein rasches Ansteigen der Fehlerrate zur Folge. Diese Tatsache schlägt sich dann ir,, Aufwand für die Taktrückgewinnung nieder.
2.4.3. Funktion des Maximum-Likelihood-Auswerters (MLSE)
Ein MLSE beobachtet den Signalverlauf über einen längeren Zeitraum (Abtastwerte) und entscheidet sich erst dann für die wahrscheinlichste Datensequenz. So trifft der hier beschriebene einfache MLSE zum Zeitpunkt Tn die Entscheidung, welches Datenbit dn-1 im vorherigen Bitintervall wahrscheinlich gesendet wurde. Kriterium bei dieser Entscheidung ist die Größe der zu jeder möglichen Datenfolge gehörenden logarithmierten Maximum-Likelihood-Funktion:

σ ist in dieser Gleichung die Varianz des als gaußverteilt angenommenen Rauschens, A der bekannte Skalierungsfaktor des Augenmusters.
Die xn sind die Abtastwerte des empfangenen Augendiagramms zu den Zeitpunkten T. Für jede mögliche Datenfolge dn-1 und dn wird das erwartete Augensignal sn = A × dn-1 + A × dn berechnet und der nte Term der Summe bestimmt. Diejenige Datenfolge, die den größten Term zur Summe beisteuert, wird dann als wahrscheinlichste empfangene Datenfolge ausgewählt.
Wird als xn ein Wert zwischen -A und +A empfangen, kann der MLSE keine Entscheidung treffen, da der Beitrag zur Summe Null wird und sowohl von der Kombination dn-1, d" = -1, +1 als auch von der Kombination dn-1, dn = +1, -1 geliefert wird. Daher wird diese Entscheidung zu nächst offen gelassen und beide Möglichkeiten dn-1 = -1 und dn-1 = +1 in zwei getrennten Schieberegistern gespeichert.
Ist zu einem späteren Zeitpunkt eine Entscheidung möglich, wird die ausgewählte Datenfolge in das Register mit der verworfenen Datenfolge kopiert und somit beide Register auf den gleichen Stand gebracht. überschreitet diese Unsicherheitsperiode die Länge der beiden Schieberegister, besteht die Möglichkeit, daß ein Fehlerbündel auftritt. Die Registerlänge sollte also so groß wie möglich gewählt werden.
3. Realisierung
3.1. Senderrealisierung
Da die analoge Realisierung des Modulationsfilters H(f) sowie der Sinus- und Cosinusfunktionen nur reit einem erheblichen Abgleichaufwand möglich ist, wurde eine digitale Lösung gewählt.
Das übertragungsverhalten des kompletten Modulationsfilters einschließlich der Sinus- und Cosinustabellen wurde vorab berechnet und in zwei EPROM-Tabellen (Sinus und Cosinus) abgelegt.
Um die guten spektralen Eigenschaften des Modulationsverfahrens nicht durch das Quantisierungsrauschen zunichte zu machen, sind mindestens 10 Bit Auflösung notwendig. Bezahlbare Preise und die noch relativ gute Beschaffbarkeit von 12Bit-D/A-Wandlern bestimmten dann die Entscheidung zu 12 Bit Auflösung.
Zwischen den D/A-Wandlern und dem Modulator muß noch je ein analoges Tiefpaßfilter geschaltet werden, um die Abtastfrequenz und deren Oberwellen ausreichend zu dämpfen. Diese Filter müssen im Basisband bis etwa fB/2 möglichst flachen Amplituden- und Phasengang aufweisen, damit keine Verzerrung der Modulationssignale erfolgt. Um diesen Filteraufwand gering zu halten, wurde die Abtastfrequenz fa auf das Sechzehnfache der Datenrate fB gelegt. Damit wird der Phasenverlauf innerhalb eines Bits durch 16 Abtastwerte interpoliert.
Für die 12 Bit breiten Tabellen sind drei EPROMs notwendig, wobei sich die niederwertigeren vier Bit beider Tabellen ein EPROM teilen. Insgesamt sind neun Adreßbits notwendig, um alle Phasenwerte zu erzeugen. Mit vier (I0 bis I3) dieser neun Bits werden innerhalb einer Bitperiode nacheinander die sechzehn Abtastwerte adressiert. Die drei Bits Dn-1, Dn und Dn+1 sind die aus dem Datenstrom ausgekoppelten Datenbits, die nach Tabelle 1 die jeweilige Phasenänderung ΔΦ bestimmen. Zwei weitere Bits (die Quadranten-bits Q0 und Q1) sind nötig, um die richtige Verwaltung der Sinus- und Cosinustabellen sicherzustellen.
In der Realisierung werden zwei zusätzliche Bits (Dn-2 und Dn+2) aus dem Datenstrom ausgekoppelt, als für die Auswahl der Phasenänderung nach Tabelle 1 notwendig sind.
Mit diesen beiden Bits wird der Tatsache Rechnung getragen, daß die Impulsantwort des Modulationsfilters H(f) (Abb. 5) ja theoretisch unendlich lange aus schwingt und durch das Abbrechen dieser Impulsantwort in der praktischen Anwendung nach n Bits das Spektrum wieder verschlechtert wird. Ein Abbrechen der Impulsantwort bei fünf Bits stellt dann einen brauchbaren Kompromiß zwischen Spektrum und Realisierungsaufwand dar.
Der Quadraturmodulator selbst4st nicht Bestandteil der Modemleiterplatten. Aus Einstrahlungsgründen sollte er dem Funkteil zugeordnet werden.
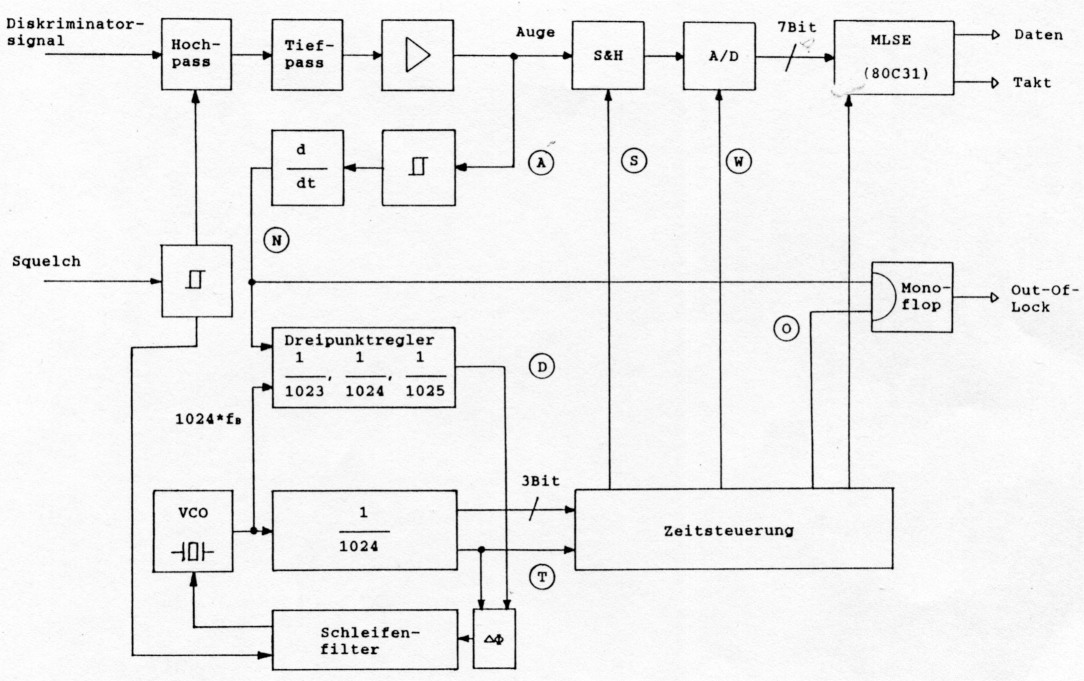
Abb. 8: Blockschaltbild des Sendeteils der übertragungsstrecke.
3.2. Realisierung des Empfängers
3.2.1. Schnittstellen zum Empfänger
Ein Hochpaß trennt zunächst den Gleichspannungsantell vorn Ausgangssignal des Frequenzdiskriminators ab.
Obwohl von der GTFM prinzipiell Gleichspannung übertragen werden kann, wurde hier auf diese Möglichkeit verzichtet, um die Schwierigkeiten und den Aufwand beim Bestimmen der temperaturund feldstärkeabhängigen Augenmitte zu umgehen. Durch die Wahl der unteren Grenzfrequenz des Hochpasses wird sichergestellt, daß etwa 20 Bit lange konstante Datensequenzen noch sicher übertragen werden.
Dem Hochpaß folgt ein Tiefpaßfilter zweiter Ordnung mit Besselcharakteristik. Dieses Filter mit 4,5 kHz Grenzfrequenz ist notwendig, um die Bandbreite des Signals vor dem Abtasten zu begrenzen. Der anschließende Verstärker mit einstellbarem Verstärkungsfaktor bringt das Augenmuster auf den erforderlichen Pegel.
Nach der Filterung und Pegelanpassung wird das Signal in den zwei Funktionsblöcken Taktrückgewinnung und Datenauswertung weiterverarbeitet.
Neben dem Basisbandsignal vom Frequenzdiskriminator muß der Empfangsteil noch ein feldstärkeabhängiges Squelch-signal liefern. Ein durch Rauschauswertung aus der NF abgeleitetes Squelchsignal ist hier nicht brauchbar, da das von beliebigen Daten erzeugte Basisbandsignal akustisch wie Rauschen wahrgenommen wird.
Das Squelchsignal bewirkt, daß die während der Sendepausen auf Speichern geschaltete Takt-PLL wieder aktiviert wird. Außerdem wird für kurze Zeit die untere Grenzfrequenz des Hochpasses im NW-Eingang erhöht, um den Ladevorgang dgs Elkos zu beschleunigen.
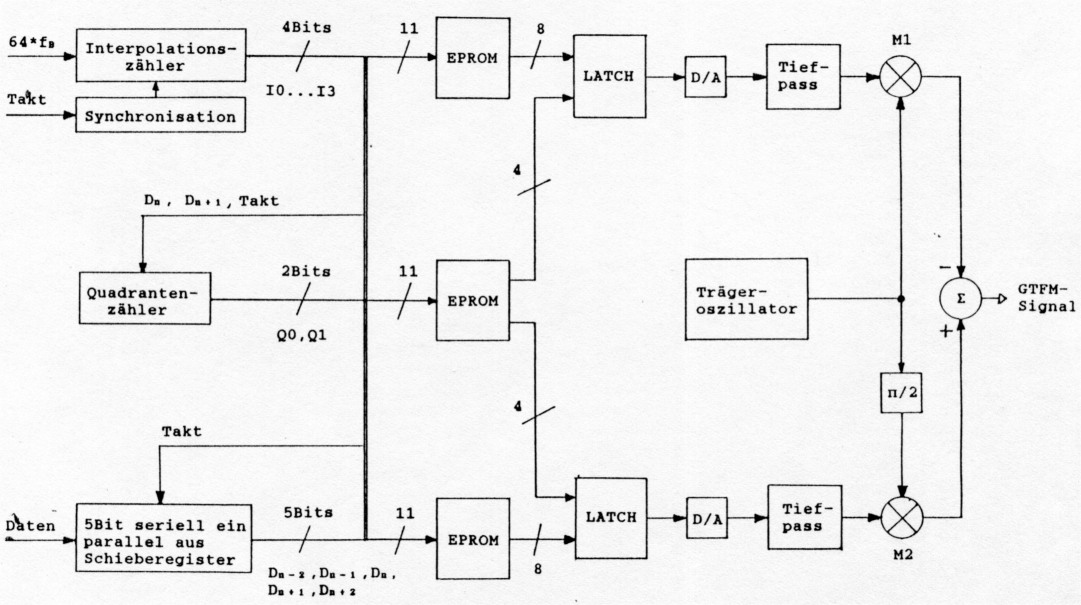
Abb. 9: Blockschaltbild des Empfängers.
3.2.2. Taktrückgewinnung
Die Taktrückgewinnung orientiert sich an den im Empfangssignal vorhandenen Nulldurchgängen. Bei ungestörtem Empfang ereignen sich diese zu den Zeitpunkten Tn, aber je nach Dateninhalt in beliebigen Zeitabständen m × TB. Im realen Empfangssignal jittern die Nulldurchgänge um die exakten Zeitpunkte, und es treten durch Rauschen zusätzliche Nulldurchgänge außerhalb des Zeitrasters Tn auf. Statistische Häufungspunkte für die Nulldurchgänge bleiben aber die Zeitpunkte T.
Das gefilterte Basisbandsignal wird zunächst von einem Komparator begrenzt und auf HCMOS-Pegel umgesetzt. Die Kornparatorschwelle ist dabei auf den mittleren Augenpegel eingestellt. Anschließend wird das begrenzte Basisbandsignal differenziert (siehe Abb. 10). Jeder der so erzeugten etwa 102 Nanosekunden breiten Impulse markiert einen Nulldurchgang.
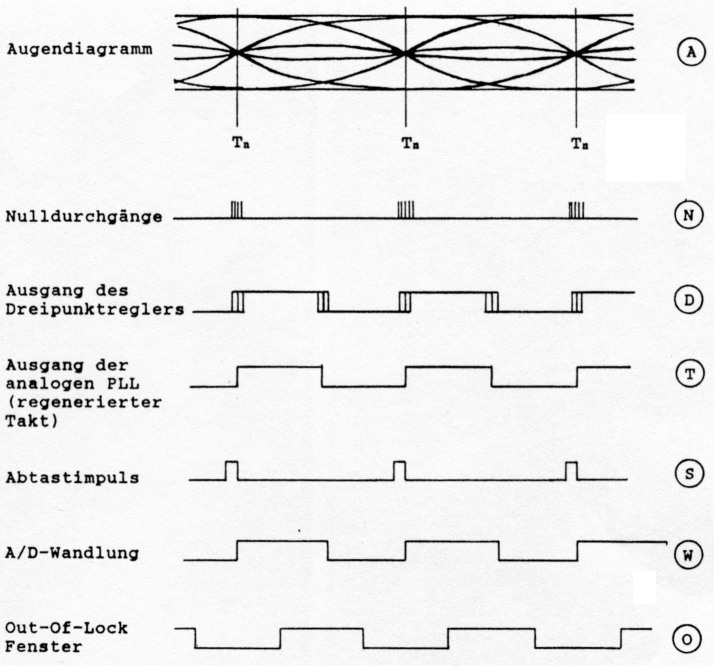
Abb. 10: Zeitablaufdiagremm Im GTFM-Empfänger.
Diese Impulse werden in einem Dreipunktregelkreis weiterverarbeitet, der aus einer Teilerkette mit umschaltbarem Teilerfaktor besteht und der sein Ausgangssignal auf die Datenfrequenz synchronisiert.
Trifft ein Impuls vor der positiven Flanke des Teilerausgangssignals ein, wird der Teilvorgang beschleunigt (Teilerfaktor 1/ 1023) und so die zeitliche Lage der Flanke zum Impuls hin verschoben. Umgekehrt wird der Teilvorgang verzögert (1/1025), wenn der Impuls nach der positiven Flanke eintrifft. Ohne Impulse beträgt der Teilerfaktor genau 1/1024.
Der Regler ist in der Lage, einen geringen Frequenzversatz des Taktoszillators auszugleichen, was für die Anfangssynchronisation wichtig ist. Da dieser aber nur eingreift, wenn Nulldurchgänge im Empfangssignal auftreten, hängt diese Fähigkeit zu sehr vorn Dateninhalt ab. Zusätzlich vergrößert jede Frequenzablage des Taktoszillators von Idealwert 1024 × fe den Jitter des so erzeugten Datentaktes.
Aus diesen Gründen wird die Frequenz des Taktoszillators von einem zweiten Regelkreis auf genau 1024 × fB ausgeregelt, wobei das Ausgangssignal des Dreipunktreglers die Führungsgröße für diesen Phasenregelkreis bildet.
Alle für die Datenrückgewinnung notwendigen Steuersignale wie Abtastimpulse, Out-Of-Lock-Fenster, Datentakt und A/ D-Wandler-Befehle werden durch Teiler aus denn nachgeführten Taktoszillator abgeleitet.
Ein Out-Of-Lock-Detektor meldet dem angeschlossenen Rechner, ob beide Phasenregelkreise auf ein GTFM-Signal mit brauchbarem Ste abstand gelockt sind. Als Kriterium wird die Streuung der Nulldurchgänge urn die Abtastzeitpunkte herangezogen.
Treten Nulldurchgänge außerhalb eines Zeitfensters von +/-TB/4 auf, wird Out-Of-Lock gemeldet.
3.2.3 Datenauswertung
Der Funktionsblock Sample ß Hold tastet das Basisbandsignal zu den Zeitpunkten Tn der größten Augenöffnung ab. Nach dem übergang in den Hold-Zustand wird die A/D-Wandlung gestartet. Dabei wird das Auge zwischen -2A und +2A mit 6 Bit aufgelöst, wodurch überläufe bei der anschließenden Arithmetik im 8-Bit-Mikroprozessor vermieden werden.
Die Realisierung des "Maximum Likelihood Sequence Estimators" ist in Abb. 11 als Flußdiagramrn dargestellt. Nach dem Einlesen des A/D gewandelten Abtastwertes xn werden zunächst die beiden Hilfsgrößen U = xn - A + Zn-1 und V = xn + A + Zn-1 berechnet. Die Schwelle A liegt in der Mitte zwischen zwei Augenstufen. Im Term Zn-1 ist die Abweichung des vorangegangenen Abtastwertes xn-1 von der Schwelle A gespeichert.
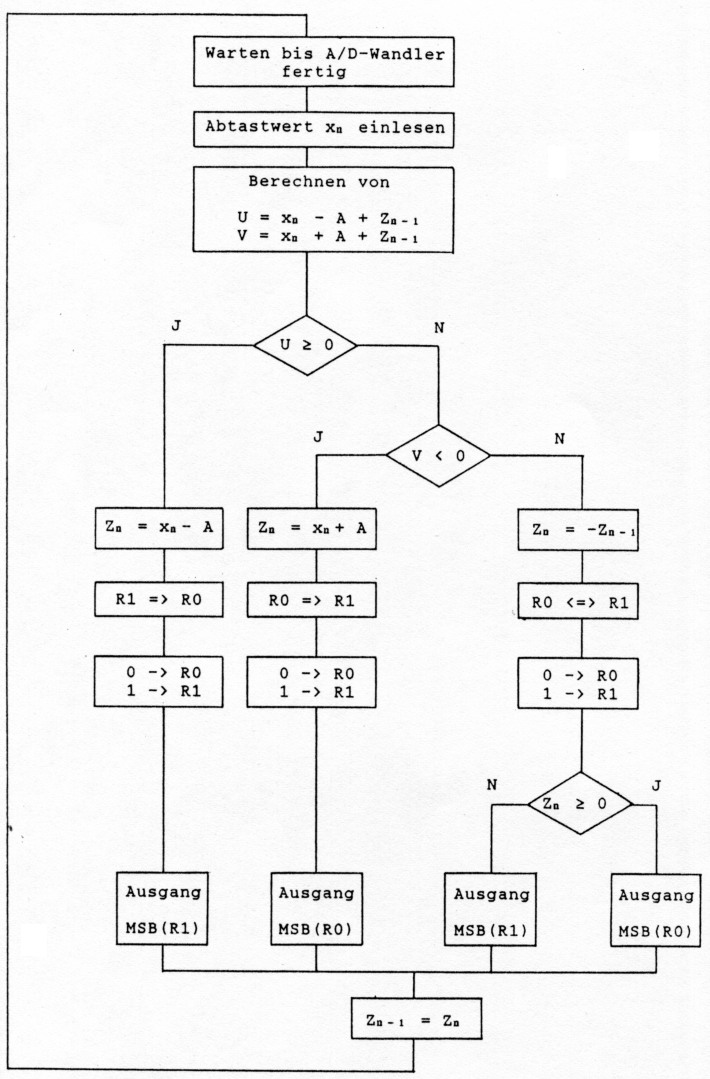
Abb.11: Flußdiagramm für den Maximum-Likellhood-Algorithmus.
In Abhängigkeit der Vorzeichen von U und V wird danach auf einen der drei Programmäste verzweigt, in denen als erstes das für die nächste Taktperiode Tn+1 gültige 4 ermittelt wird. Es folgt in den Zweigen I und II das überschreiten der jeweils verworfenen Datenfolge durch die ausgewählte Datenfolge. Zweig Ill repräsentiert den Fall, daß zu diesem Zeitpunkt noch keine Entscheidung über die wahrscheinlichste Datenfolge getroffen werden kann. Die Register R0 und R1 tauschen ihre Dateninhalte aus.
Anschließend werden in allen Zweigen beide Register urn eine Stelle in Richtung MSB geschoben. Dabei wird in Register R0 eine "0" und in Register R1 eine "1" in das LSB nachgeschoben. Gleichzeitig wird je nach Programmzweig das MSB des ausgewählten Registers in ein Ausgaberegister geschoben, an dem die Empfangsdaten zur Verfügung stehen.
In der Praxis hat sich gezeigt, daß eine Registerlänge von 8 Bit nicht ausreicht. Dagegen wird durch 24 Bit gegenüber 16 Bit Registerlange kaum eine Verbesserung erzielt. Da Register mit 16 Bit Länge vom verwendeten Prozessor 80C31 noch gut zu handhaben sind, werden R0 und R1 mit 16 Bit Länge realisiert.
4. Abschließende Bemerkungen
Wie alle digitalen übertragungsverfahren reagiert auch die GTFM sehr empfindlich auf nichtlineare Phasengänge auf dem übertragungsweg. In der Hauptsache werden solche Verzerrungen durch steilflankige Filter in den Zwischenfrequenzbaugruppen hervorgerufen. Solche Effekte sind als "Klingeln" bei der Morseübertragung ja hinreichend bekannt. Bei der digitalen übertragung bedeutet das, daß die Impulsantwort der gesamten übertragungsstrecke verbreitert wird und Signalanteile über mehr als drei Bit verschmiert werden. Das kann sogar soweit gehen, daß im Empfangssignal ein Auge nur schwer erkennbar wird.
Die Wahl des ZF-Filters sollte daher lieber zugunsten eines weniger steilen Filters ausfallen, oder es sollte zumindest ein Filter mit einer Bandbreite von etwa der doppelten Datenrate eingesetzt wer-, den und die damit verbundene geringere Trennschärfe in Kauf genommen werden.
Aber auch die für die Sprachübertragung übliche Bandbegrenzung sowie Deemphasisnetzwerke auf der NF-Ebene müssen bei einem Umbau für digitale übertragung überbrückt werden.
Anders als bei der übertragung von digitalisierter Sprache wird bei der PacketRadio-übertragung eine wesentlich geringere Fehlerwahrscheinlichkeit gefordert. Ist Sprache bei einer Fehlerrate von 10-3 noch gut verständlich, sollte bei der Packet-Radio-Anwendung eine Fehlerrate von 10-6 nicht überschritten werden. Diese Fehlerrate sollte vom Empfänger spätestens bei etwa -100 dBm Empfangsleistung erreicht werden. Für ausreichende Reserve ist die übertragungsstrecke dann auf etwa -90 dBm Empfangsleistung zu dimensionieren.
Literatur
- F. de Jager, C. B. Dekker: Tamed frequency modulation, a novel method to achieve spectrum economy in digital transmission. In: IEEE Transactions on Communicatins COM-26 (1978), S. 534-542.
- K. S. Chung, L. E. Zegers: Generalized tamed frequency modulation and its application for mobile radio communication. In: IEEE Transactions on vehicular technology VT-33, August 1984, S. 103-113.
DC4ZB, Karl-Richard Stry.