Basic principles of self-synchronous repeaters
How synchros work and how to use them.
There are almost as many different kinds of position repeaters as there are ingenious individuals to conceive them. Some of the better-known ones are d.c. systems using potentiometers, step-by-step systems, Magnesyns, and the one used so much during the war, the Selsyn or "synchro" system. Since this latter is the most flexible and the most widely used, and because so many of the units are showing up in surplus at reasonable prices, the purpose of this story is to acquaint the amateur with the working principles.
A synchro is simply a device for changing mechanical movements into electrical information and vice versa. This movement is usually the angular rotation of a shaft. A basic synchro system consists of two synchros: one, a generator or driver, the other, a motor or follower.
One of its commonest uses is to transmit information on the angular position of a radar antenna, either to give target position relative to ship or plane heading, or by introducing information from a gyrocompass, through a differential synchro, to indicate target position with respect to true north. But they can of course be used in any application where it is necessary to duplicate at a distance some given angular setting, and amateurs are using them for beam-position indicators and for some remote-tuning applications.
Synchros, so named by the Navy, when made by G.E. are called Selsyns, when made by Bendix are called Autosyns, and are called Teletorques by Kollsman. They may be grouped into five types according to their use, as follows: (a) generator (transmitter); (b) motor (receiver); (c) control transformer; (d) differential generator; (e) differential motor. For amateur applications, a knowledge of the generator and motor operation is sufficient.
Synchro operation
A synchro motor or generator consists of a single rotor winding, as R in Fig. 1, and three stator windings spaced 120°, as S1, S2 and S3 in the same diagram. If a.c. is applied to R through terminals R1 and R2, voltages will be induced in S1, S2 and S3. If, for the purposes of illustration, the rotor winding R and the three stator windings all have the same number of turns, the voltage induced in Si will be equal to the voltage across R. However, sine S2 and Sa are not so closely coupled - their axes are 120° off the axis of R - lower voltages will be induced in these other two stators. The arrows alongside the rotor and stators can be used to represent the voltage across the coils or the magnetic fields of the coils and, while it is known that the direction changes with each reversal of current, the relative amplitudes and directions remain constant for a fixed relative position of the rotor and stators.
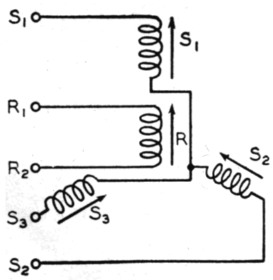
Fig. 1. The basic synchro unit consists of a single rotor, R, and three equally-spaced stator windings. The arrows represent the voltage across the winding or the direction and magnitude of its magnetic field, when the rotor is excited by a.c.
To simplify the diagram, the arrows only are redrawn in Fig. 2 and separated into three rows labeled "rotor," "stators" and " resultant." Fig. 2-A is, of course, the same as Fig. 1, and shows the rotor in a position that will be called "0°". If the rotor is now rotated 30° clockwise, it is at right angles to 82 and no voltage is induced in that stator, but voltages of equal magnitudes are induced in S1 and S3, as represented in Fig. 2-B under "stators" for 30°. As the rotor is moved another 30° (60° in Fig. 2-C) the voltage induced in S1 is further reduced, a voltage is induced in 82 but in the opposite relative direction, and the voltage induced in Sa is increased. Diagrams for other steps of 30° are also shown in Fig. 2, and it can readily be seen how the induced voltages vary with rotation of the rotor.
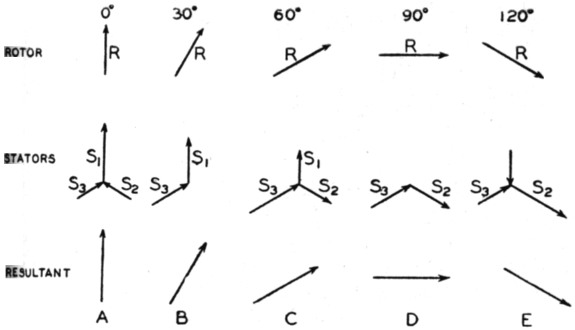
Fig. 2. A representation of the changes in rotor and stator voltage or fields, with different positions of the rotor between 0° and 120°. The relations for the remainder of the revolution are not shown, but they can be easily derived from the above.
Since it was agreed that the arrows represented voltage or magnetic field, it can be seen that the arrows of the three stators as shown under "stators" represent the individual magnetic fields of the stators. These three fields can of course be combined in one "resultant" field, and this is shown in the third row of Fig. 2 under "resultant." Note that in every case the resultant has the same direction as the arrow used to represent the rotor voltage or field.
If now a similar synchro motor is connected in parallel with the synchro just under consideration, as in Fig. 3, and the rotors are excited with a.c., a synchro system will result. If the (otor of the generator has a position of 0°, as in Fig. 3, the voltages generated in the motor stators by the rotor rotor will be equal to those in the generator stators if the motor rotor has the same position r(0°) as that of the generator rotor. However, if the generator rotor is moved, a different condition of voltages will appear at the generator stator terminals, and this different voltage condition will be transmitted to the stator terminals of the motor by the connecting wires. These voltages, combining with the generated voltages at the motor stators, combine to form a resultant field that exerts a torque on the motor rotor, and the motor rotor turns, if possible, until its field is aligned with the newly developed stator field of the motor. When it reaches this new point, there is no further torque on the motor rotor, but it is held in position because torque immediately develops if the motor rotor is displaced. It is thus apparent t maximum torque is developed in a synchro ni when there is a considerable difference in setting between the generator and the motor rotors. Actually, however, the motor rotor is clamped securely in place by the stator field and there is no tendency for it to "wobble" about its proper setting.
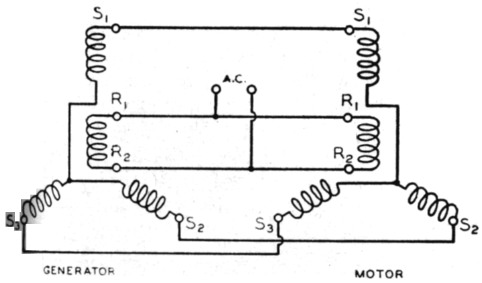
Fig. 3. Connecting two synchros together as shown exciting the rotors with a.c. results in a synchro. The rotor in one Selsyn will automatically adjust o the position of the other rotor.
It will be apparent from the preceding discussion that there is no difference between generator and motor action, and if the generator shaft is free to move, it will follow changes in the position of the motor rotor. However, the generator is usually tied rigidly to a heavy object like a radar antenna, and so it has no chance to run away, as a synchro motor would when it once got started. Thus the generator is essentially simple since, being tied directly to the driving mechanism, it cannot get out of line. However, the motor rotor is usually only used to drive a lightweight dial or pointer, and if the rotation is fast enough, as it can be in a 36-speed synchro, it can keep rotating, generating enough voltage within itself to burn itself up. Therefore the motor has a damping device, usually a flywheel, to act as a brake. Since accuracy is one of the important characteristics of a synchro system, the motor must be lubricated with a very fine grade of oil, and there must be no appreciable load on the rotor to create any error. The flywheel brake is usually constructed to take effect only during a change in speed. One way this is done is to mount the flywheel as shown in Fig. 4.
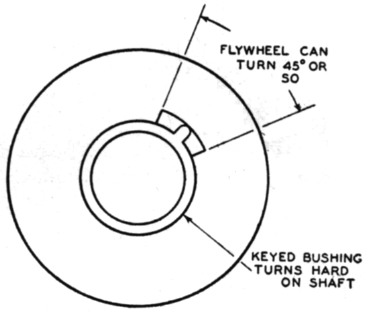
Fig. 4. A type of brake used on synchro motors to prevent their "running away." The inertia of the flywheel resists sudden changes in shaft position but has little effect on slow ones.
General
If two synchros are connected as shown in Fig. 3, no trouble should be experienced. However, if the connections to S2 and S2 are reversed on one of the synchros, the generator and the motor will turn in opposite directions. This is a useful feature in any application where, for mechanical reasons, the synchros must turn in opposite directions.
Many of the synchros available in the surplus market were designed for 115-volt 400-cycle operation. However, they can be used satisfactorily on 60-cycle supplies if the voltage is reduced, generally down to about 45 or 50 volts. When 400-cycle units are being used with 60-cycle excitation, only sufficient voltage should be used to develop enough torque to move the indicator, and there should be no appreciable heating of the unit.
John S. Gossland, W2BJB.