Fernsteuerung für Horizontalrotoren
Wenn man schon den Transceiver vom Computer aus steuert, warum dann nicht auch den Antennenrotor? Das Problem meist liegt in der Steuersoftware und der zusatzlichen Schnittelle für die Rotorsteuerung. Eine Lösungsmöglichkeit ist die Verwendung eines preiswerten Mikrocontrollers in Verbindung mit einem LC-Display.
Eigentlich müsste die Überschrift darum heißen "Die Fernsteuerung des Steuergerats für Horizontalrotoren"... Im Prinzip erlaubt die Baugruppe auch eine Fernsteuerung wie sie bei den modemen Transceivem über die V.24-Schnittstelle moglich ist. Mit einem ftinfadrigen Kabel kann man über mehrere Meter das in der Mlle des Transceivers positionierte Rotorsteuergerat bedienen, erhalt eine Rückmeldung über die Antennenrichtung, kann einen Preset wahlen und (bei modemen Rotoren mein- als wichtig) den Drehwinkel bis 500° erfassen und steuern.
Zunachst soil geklart werden, mit welchen Konzepten der Rotor steuerbar ist und wie eine Positionsmeldung erfolgen kann. Das ist interessant, wenn am Steuergerat keine Fernsteuer-Steckverbindung vorhanden ist.
Drehen und Melden
Vorab die Verstandigung über einige Begriffe: Die Drehrichtung im Uhrzeigersinn wird bier als Rechtslaufbezeichnet. Die Abkürzungen CW (clockwise) fur den Uhrzeigersinn and CCW (counterclockwise) entgegen sind zwar kürzer, aber CW heiBt auch Telegraüe. Die vom Poti im Rotor gelieferte Spannung bezeichne ich als Richtungsspannung.
Antriebsmotoren arbeiten mit Wechsel- oder Gleichspannung. Wechselstrommotoren erzeugen keine Funkenstorungen, aber es werden drei Adem benotigt. Das Einschalten in Verbindung mit der Drehrichtung wird durch geeignete Relais realisiert. Bei Gleichstrommotoren werden nur zwei Adem benotigt, aber bier konnen Funkenst8rungen auüreten. Der Vorteil liegt in der hohen Leistungsabgabe beim Hochfahren bzw. in der geringen erreichbaren Drehzahl; dies istbei groBen Antennen nicht zu unterschatzen. Zur Steuerung werden bei modemen Rotoren Halbleiter eingesetzt.
Zur Meldung der Antennenrichtung liefert das lineare Potentiometer im Rotor bei einem üblichen Drehwinkel von 275° 0 bis meist 5 V DC. Eire kleines Zahnradgetriebe zwischen Potiachse und Abtrieb ennoglicht die Anzeige über die 275° hinaus.
Für die Kopplung mit der Baugruppe wird bei der Relaisvariante derjenige Wicklungs kontalct benotigt, über den das Relais durch den Tasterkontakt an Masse gelegt wird. Bei modemen Rotoren wird für Links- and Rechtslauf jeweils ein TTL-Eingang an Masse gelegt. Diese Kontakte sind ebenso wie die Richtungsspannung an der Rückseite des Rotorsteuergerats verfügbar. Der Hersteller Emotator stellt bier zusatzlich für die exteme Steuerung eine positive Spannung von 8-11 V DC/300 mA bereit. Das ist ideal, mit funf Kontakten bzw. Kabeladern ist man dabei: Masse/GND, 11 V, Linkslauf, Rechtslauf, Richtungsspannung.
Entdecke die Müglichkeiten
In Bild 1 sind alle notwendigen and moglichen Verbindungen zu sehen. Links stellt die Buchse die Verbindungen zum vorhandenen Rotorsteuergerat her. Die Kontaktnummerierung erfolgte willkürlich, andere Belegungen oder Steckverbindungen sind moglich. An den Kontakten "Rechts" and "Links" said die wirksamen Steuerpegel eingezeichnet. Zusatzlich konnen hier zwei Taster zur manuellen Steuerung angeschlossen werden. Die beiden LED für Links- and Rechtslauf sind zu empfehlen. Mit dem Poti "Preset" kann man die Richtung in Grad vorgeben. Nach Betatigen der Taste "Start" erfolgt über die Leitungen "Links" bzw. "Rechts" die Richtungsanderung. Und damit man alles schon sehen and voreinstellen kann, zeigt ein LCD diverse Informationen: links die aktuelle Antennenrichtung (Rotoranzeige), in der Mitte der Preset-Wert (Preset-Anzeige), L als gegenwartige Drehrichtung and rechts nochmals ein Gradwert, den Uberlauf.
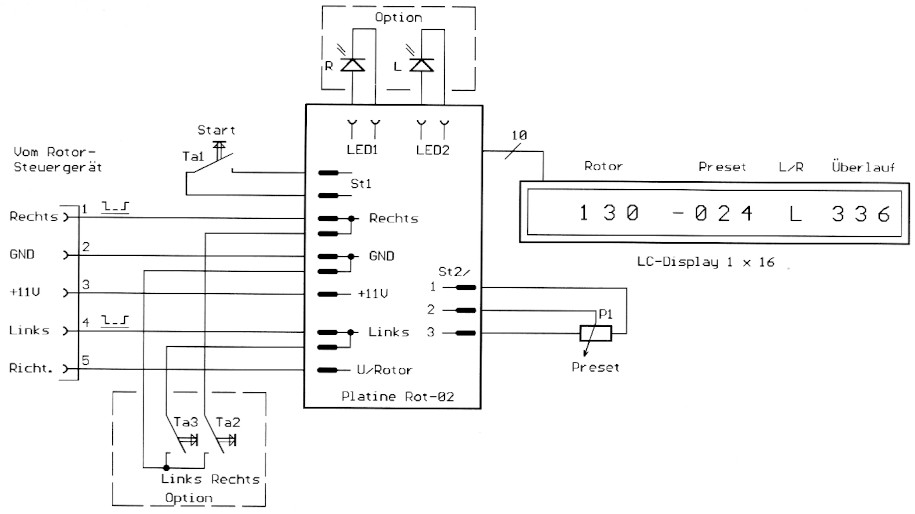
Bild 1: Blockschaltbild der Baugruppe fur die Fernsteuerung.
Wozu diese vielen Anzeigen? 500° entsprechen einem Uberlauf von 140°. Bei diesem (theoretischen moglichen) Drehwinkel kann man den Rotor so arretieren, dass er linksherum bis 70° unter 0° (also 360° - 70° = 290° bzw. 0° - 70° = -70°), rechts herum bis 360° + 70° = 430° dreht. In diesem Fall erfolgt am Linksanschlag die Rotoranzeige -70°, am Rechtsanschlag aber 430°. Das prazisiert den waken Rotorstand. Sinnigemäß kann man nun einen Preset über 360° wahlen. Unterhalb 0° wird die Preset-Anzeige ebenfalls mit einem Minus dargestellt. Bei Werten rechtsdrehend über 360° hinaus werden sowohl in der Rotor- als auch in der Preset-Anzeige die Werte über 360° angezeigt. Um das Ganze übersichtlicher zu machen, erfolgt rechts im Display tinter Uberlauf eine zusatzliche Gradanzeige für den Preset-Wert. Bei Werten linksdrehend über 0° hinaus erfolgt die Anzeige der Differenz 360° - Rotor-stand, bei rechtsdrehend über 360° hinaus als Differenz Rotorstand - 360°. Hort sich kompliziert an, ist es aber nicht.
| IC1 | PIC16F84-20/P, prog. Var. Rot02 |
| IC2 | PCF 8591 |
| IC3 | 7805 |
| Tsl,2 | BC 547B o. a. |
| LED1,2 | Low Current (2 mA) |
| Display | Sharp LMI61, Seiko MI6410A o. a. |
| R1,2 | 3,3 kOhm, BF 0207 |
| R3,10 | Einstellregler 10 kOhm, BF PTIOL |
| R4,5 | 330 Ohm, BF 0207 |
| R6,7,12 | 100 Ohm, BF 0207 |
| R8 | Spindeltrimmer 50 kOhm, BF 64W |
| R9 | 1 kOhm, BF 0201 |
| R11 | Einstellregler 1 kOhm, BF PTIOL |
| R13,14 | 10 kOhm, BF 0207 |
| R15,16 | 22 kOhm, BF 0207 |
| R17,18 | 2,2 kOhm, BF 0207 |
| R19 | s. Text |
| RN1 | R-Netzwerk, 5 x 10 kOhm, RM 2,5 |
| P1 | Poti 5 kOhm, lin. |
| X1 | Quarz 16 MHz, HC49-11 |
| St1,JP1 | zweipol. Stiftleiste, RM 2,5 |
| St2 | dreipol. Stiftleiste, RM 2,5 |
| 9 Lotstifte, 1 mm Durchmesser | |
| 2 IC-Fassungen für IC1, IC2 | |
So bedeutet z. B. die Preset-Anzeige -024, dass die Antenne linksherum über 0° hinausgedreht werden soil. Die "echte" Richtung ist care 336°, angezeigt rechts im Display. Der Rotor steht gegenwartig bei 130°, angezeigt links im Display. Und der Buchstabe L sagt aus, dass die Antenne linksherum gedreht wird.
Der Maximalwert des Drehwinkels sowie die Ablage linksseitig über 0° hinaus konnen vom Anwender eingestellt werden. Die Ablage wird im EEPROM des PICs gespeichert. Eine Korrektur ist problemlos moglich. Natürlich ist auch ein Drehwinkel und Preset-Wert von lediglich 360° einstellbar.
Zum Stromlaufplan
Kernstück in Bild 2 ist IC1, der PIC16F84-20/ P. In seiner Software sind alle Steuerbefehle und Rechenoperationen enthalten. Da Rechenaufwand sowie Datentransfer nicht unerheblich sind, wurde die Taktfrequenz sehr hoch gewahlt. Die Betatigung der Taste "Start" (Tal) bewirkt, das Berechnen der Differenz zwischen Rotorstand und Preset-Wert und die Steuerung Linkslauf bzw. Rechtslauf bis zum Gleichstand beider Werte. Ober R13 und 14 werden Tsl und 2 angesteuert, die mit ihren offenen Kollektoren einerseits die LED und andererseits je nach Steuergerat entweder die Relais ür die Drehrichtung oder die TTLEingange gegen Masse ziehen. JP1 ist für die Einspeicherung der Ablage zustandig.
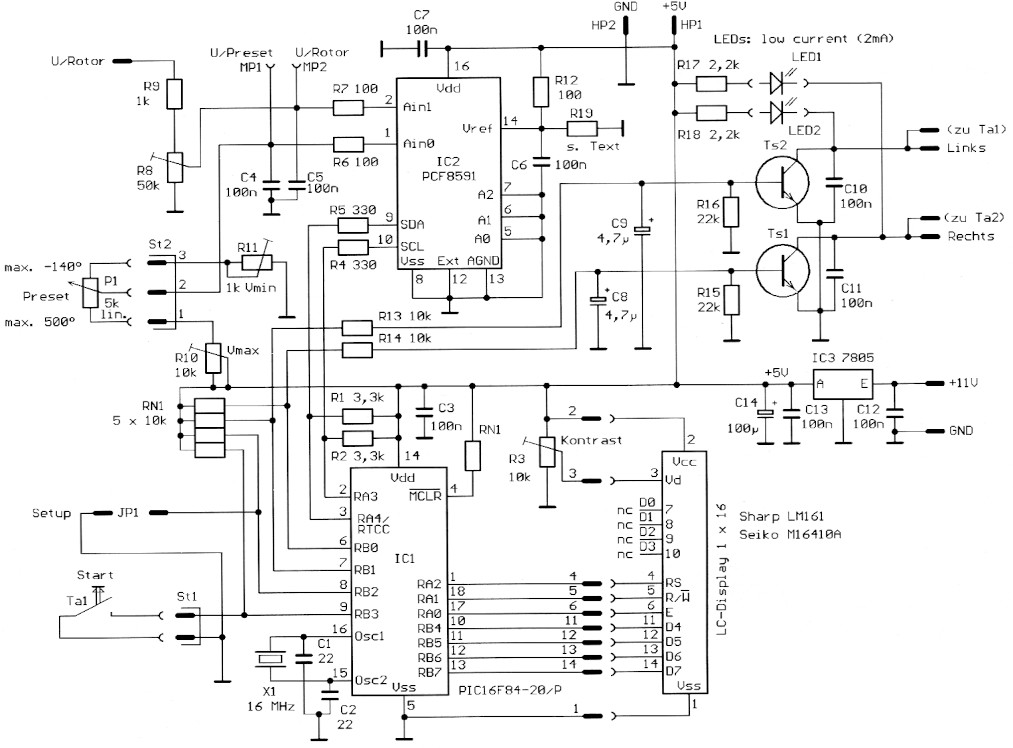
Bild 2: Stromlaufplan der Baugruppe.
IC2 (PCF 8591) ist ein Vierkanal-A/D-Konverter für I2C. Am Eingang Ain1 wird die Richtungsspannung, an AinO die Preset-Spannung ausgewertet. Der Datentransfer erfolgt via SDA und SCL zwischen IC2 und IC1.
Pin 14 von IC2 ist der Anschluss für die Referenzspannung des AID-Konverters von maximal 5 V. Im vorliegenden Fall ist R19 nicht bestückt. Damit konnen Ain 1 und 0 maximal 5 V auswerten. Hohere Maximalwerte konnen durch R8 herabgesetzt werden. Niedrigere Maximalwerte kOnnen durch Anderung von R12 und Einsatz von R19 angepasst werden. Die Berechnung beider Widerstande kann mittels der Spannungsteilerregel erfolgen, wobei für den Eingangswiderstand an Pin 14 100 kOhm anzusetzen sowie ein Eingangsstrom von 250 nA zu berücksichtigen sind. Ebenso ist eine experimentelle Lo-sung mit R12 zwischen 2 und 5 kOhm moglich. R19 wird solange verandert, bis die Referenzspannung etwa 0,5 V über der maximalen Richtungsspannung liegt.
Mittels R10 and 11 wird die Preset-Spannung an die Richtungsspannung angepasst. R11 hat normalerweise 0 Ohm, kann aber bei beachtlichem Spannungsabfall über langen Leitungen zur Korrektur der Minimalspannung dienen.
Das LC-Display bietet 16 Zeichen. Der angegebene Typ ist ohne Hintergrundbeleuchtung. Bei einem Exemplar mit Hintergrundbeleuchtung ist die zusatzliche Stromaufnahme nicht unerheblich.
Die Hilfspunkte HP1 und 2 dienen nur dem Abgleich. Hier kann ein Poti angeschlossen werden, dessen Schleifer eine Richtungsspannung an U/Rotor simuliert. Das kann sinnvoll rein, urn sich mit dem Funktionieren der Baugruppe vertraut zu machen.
Die Stromaufnahme bei 12 V liegt betragt 15 bis 20 mA.
Noch einige Worte zum A/D-Konverter: Er arbeitet mit 8 Bit Breite. Damit waren maximal 256 unterschiedliche Spannungswerte auswertbar. Die Software aber verdoppelt die Werte, and somit sind problemlos 500 Schritte darstellbar. Dies bedeutet aber auch, dass jeder Schritt zwei Richtungsgraden entspricht. Sowohl Anzeige und als auch Auswertung sind daher stets geradzahlig.
Die Realisierung
Die Baugruppe ist auf einer einseitig kaschierten Platine 100x80 mm untergebracht (Bild 3 und 4). Besonderheiten gibt es nicht. IC1 und IC2 sitzen in Fassungen. Die Steckverbindung "Start" and JP1 sind zweipolige Stiftleisten im Raster 2,54 mm. Beim Einspeichem der Ablage kann die Buchsenleiste von der Stiftleiste "Start" abgezogen und auf JP1 gesteckt werden. Dann erfolgt durch Betatigen der Taste "Start" die Speicherung des Ablagewerts.
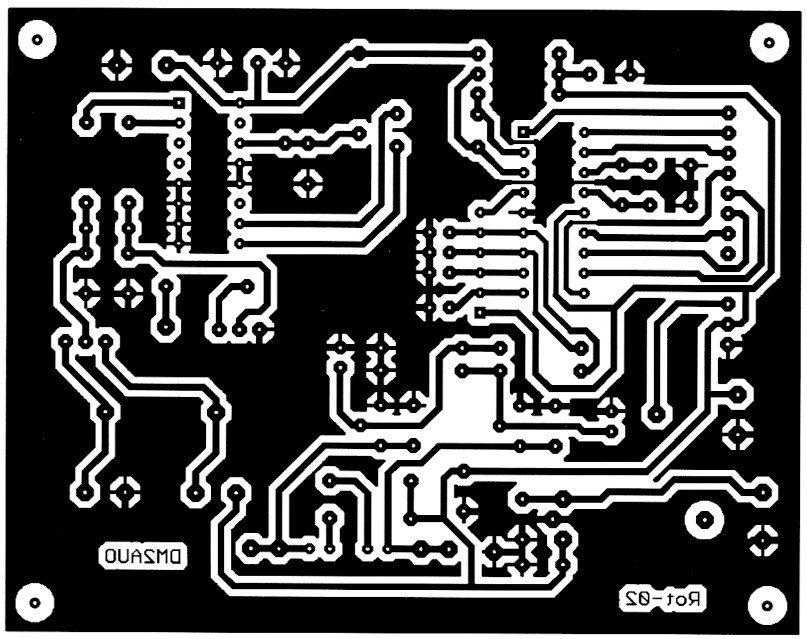
Bild 3: Layout der Platine, gespiegelt, Bohrkicher minimiert und vereinhettlicht.
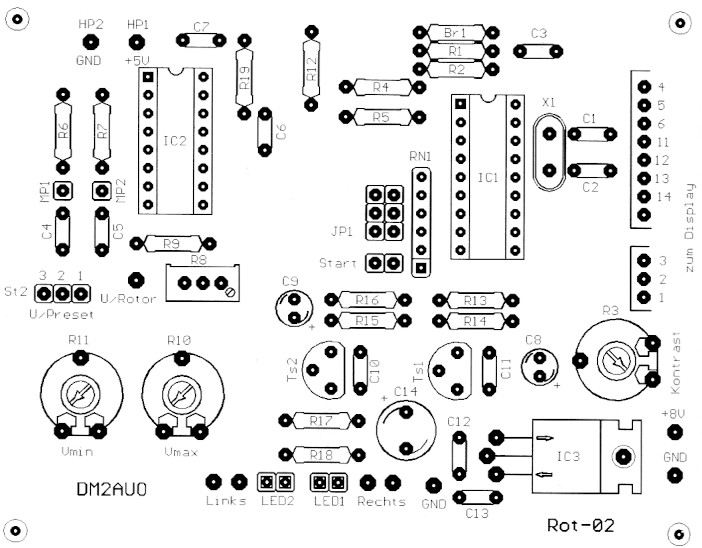
Bild 4: Bestückung der Platine.
Zum Display führen zehn Leitungen. Ich verwendete hierzu auf der Platine eine dreipolige und eine siebenpolige Stiftleiste and am Display eine 14-polige Stiftleiste mit jeweils entsprechenden Buchsenleisten. Die Kontaktbezeichnung im Bestuckungsplan entspricht den Kontakten am LCD.
Neben JP1 sind auf der Platine noch vier Lotaugen zu erkennen. In dieser Baugruppenvariante bleiben sie ohne Funktion.
Bild 5 gestattet einen Blick in das Gerat und auf die Platine.
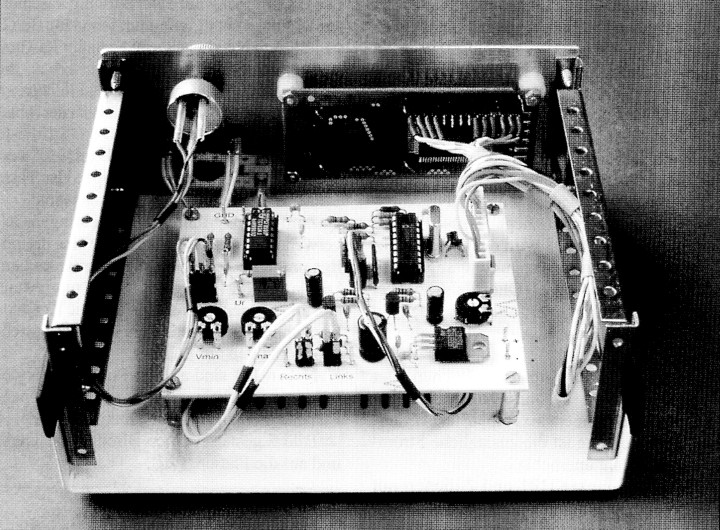
Bild 5: Blick in das Steuergerat.
Der Abgleich
Die Software Rot-02 ist für Rotoren bestimmt, die ihren Linksanschlag bei 0° bzw. Nord haben. Drehwinkel über 360° hinaus sind kein Problem, sie werden normalerweise schon bei der Rotor- und Antennenmontage berücksichtigt. Ublicherweise wird der Wert über 360° halbiert, dann ist der Linksanschlag des Rotors urn diese Halfte weiter nach links über 0° hinaus gedreht. Der Rechtsanschlag beündet sich daher urn die andere Halfte über 360° rechtsdrehend.
Sollte der vorhandene Rotor noch keine separate Buchse oder Steckverbindung für eine Fernsteuerung besitzen, so muss im Stromlaufplan des Original-Steuergerats der Punkt gesucht werden, an dem die Richtungsspannung vom Rotor kommend anliegt. Im Betrieb ist die Spannung am Linksanschlag (fast immer 0 V) und am Rechtsanschlag zu messen. Aufgrund dieser Werte kann man einschatzen, ob die Referenzspannung angepasst werden muss.
Dann werden die Steuerpunkte fur Linksund Rechtslauf gesucht. Moglich sind Varian-ten entsprechend Bild 6 oder 7. Durch die Verbindung mit Masse muss sich der Rotor drehen lassen.
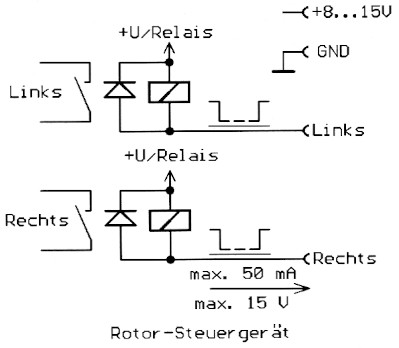
Bild 6: Anschhisse bei Steuergeraten mit Relaissteuerung, stark vereinfacht.
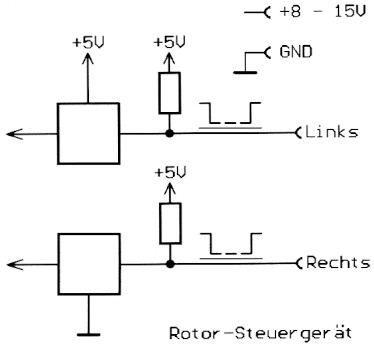
Bild 7: Anschkisse bei Steuergeraten mit TTLSteuerung, stark vereinfacht.
Abschließend wird im Original-Steuergerat eine Betriebsspannung 8-15 V DC gesucht, mit der die Baugruppe gespeist werden kann. Bei den modernen Rotoren sind diese fünf Anschlusspunkte (mit GND) auf einer Steckverbindung vorhanden.
Nun wird die komplette Baugruppe an die Betriebsspannung gelegt. Die Kontakte "Rechts", "Links" und "Richt." bleiben zunachst offen. Im Display werden fair Rotor und Preset jeweils 000 angezeigt. Da der maximale Drehwinkel bereits bekannt ist, wird jetzt der Rotor durch das Original-Steuergerat an den Rechtsanschlag gefahren. Die Richtungsspannung wird nun an die Baugruppe gelegt. Die Rotoranzeige ist jetzt mittels R8 auf den maximalen Rotordrehwinkel zu kalibrieren. Ms Beispiel sollen es 460° rein. R11 wird an den Linksanschlag gedreht, P1 an den Rechtsanschlag. Durch Veraridern von R10 wird die Anzeige "Preset" dem maximalen Drehwinkel des Rotors angepasst. Mittels P1 muss sie sich nun zwischen 0° und 460° verandern lassen. Jetzt konnten bereits die Kontakte "Links" und "Rechts" mit dem Rotorsteuergerat verbunden werden.
Bei einem vom Rotorstand abweichenden Preset-Wert bewirkt das Betatigen der Taste "Start" die Aktivierung des Rotors, die entsprechende LED leuchtet. Aul3erdem ist nun L oder Rim Display sichtbar.
Nun zur Ablage: Vorausgesetzt, dass der Rotor die eine Halfte des Drehwinkels über 360° nach rechts, die andere Halfte aber über 0° hinaus nach links dreht, so ist eine gleichmaBige Ablage von jeweils 50° fdr obiges Beispiel gegeben. Bei einer Unsymmetrie ist das aber auch kein Beinbruch. Wenn z. B. linksherum nur 30° staff 50° moglich sind, so dreht der Rotor eben rechtsherum bis (360 + 50 + 20)° = 430° anstelle 410°. Der nachste Schritt ist das Heranfahren an den Linksanschlag, der Winkel unterhalb 360° wird notiert. Im Normalfall ist die Software so ausgelegt, dass die Ablage betragt. Der neue Wert kann nun gespeichert werden. Dazu wird das Poti "Preset" auf die Anzeige des geplanten Ablagewerts eingestellt. Nehmen wir 50° an! Die Steckverbindung der Starttaste wird abgezogen and auf JP1 gesteckt, Ts 1 betatigt. Dabei muss als Anzeige des Rotor-werts für die Dauer der Betatigung "Set" erscheinen. Taste loslassen, Betriebsspannung ausschalten, P1 nicht verstellen. Nach dem Wiedereinschalten zeigt die Preset-Anzeige den doppelten Wert der gespeicherten Ablage. Drehen an P1 bis zum Linksanschlag bringt jetzt ftir obiges Beispiel einen Preset-Wert von -50°, der pberlauf zeigt 310° (360° - 50°). Der Rechtsanschlag von P1 erzeugt 410° (360° + 50°), als Uberlauf erscheinen 50°.
Eine Korrektur des Ablagewerts ist jederzeit moglich. Dazu wird P1 an den Linksanschlag gedreht (0 V bzw. 0°).Unabhangig von der Preset-Anzeige ist die Speicherung wie oben vorzunehmen. Nach dem Wiedereinschalten betragt die Ablage wieder 000°, der Ausgangswert. Jetzt kann ein neuer Wert gespeichert werden.
In der Praxis
Das Positive an der Sache ist, dass man keine neue Computerschnittstelle benotigt. Unabhangig von anderen bereits laufenden Programmen kann die Antennenrichtung vom Computerarbeitsplatz aus verandert werden, der Preset halt bei Erreichen des vorgegebenen Wertes den Rotor an.
Gut ist aber auch, dass keine eigene Betriebsspannung ftir die Baugruppe ben8tigt wird. Die maximal 20 mA darften auch schwächere Rotorsteuergerate schadlos hergeben.
Sehr gut würde rich ein Poti mit Getriebe oder ein Zehngang-Poti far die Einstellung des Presets machen.
Die Verbindung zum Original-Steuergerat erfolgt über ein fünfadriges Kabel. Bei mir ist es 8 m lang, unabgeschirmt. Fehlsteuerungen oder Fehlauslosungen traten nicht auf, HF-Einstromungen konnten nicht festgestellt werden.
Bei Bedarf konnen sowohl Platinen als auch Bausatze wie ablich via www.4ham.de bezogen werden.
DM2AUO, M. Perner.