Problemlösungen beim Bau von Senderverstärkern für KW-Bereiche 9
Und wie sieht das Berechnungsverfahren für fg aus, wenn man es mit unsymmetrischen π-Filtern zu tun hat, mit C1 ≠ C2 wegen R1 ≠ R2? Auf Fälle dieser Art geht die Literatur(25) nicht ein.
Die Formel

"weiß ja nicht", daß C1 = C2, und daher kann C1 = C2 auch keine zwingende Voraussetzung für die ausschließliche Anwendbarkeit dieser Formel auf symmetrische π-Filter-Tiefpässe sein. Wenn C1 ≠ C2, also in Fällen unsymmetrischer π-Filter, muß sie fg auch eindeutig erfassen können.
Im weiter oben angeführten Fall eines π-Filter-Tiefpasses mit C1 ≈ 128 pF, C2 ≈ 117 pF und L ≈ 1,14 µH ist der Ansatz
![]()
Das Ergebnis deckt sich mit dem, das man erhält, wenn man sich der Thomsonschen Schwingkreisformel(23) bedient. Das war, wie gesagt, zu erwarten. Offenbar ist es richtig, die Grenzfrequenz fg von π-Filter-Tiefpässen ganz allgemein unter Verzicht auf den Halbglied-Gesichtspunkt in üblicher Weise mit der Formel

zu berechnen oder auch mit der Formel
![]()
und in beiden Fällen mit
![]()
da ein π-Filter ein Parallelschwingkreis ist, in dem C1 und C2 in Reihe geschaltet sind.
Die normierte Frequenz η-Gradmesser der Wirkleistungsübertragung eines π-Filter-Tiefpaß-Kathodenkreises
Die zur Erweiterung des an dieser Stelle textlich Erklärbaren bestimmte Strichzeichnung (Bild 3 - s. CQDL 4/94, S. 246) zeigt drei Möglichkeiten, ein π-Filter für die Transformation von 50 Ω auf 200 Ω zu gestalten. Die zeichnerische Darstellung erlaubt es, an Hand der drei zugehörigen Frequenzen η wichtige und allgemeingültige Rückschlüsse zu gewinnen.
Mit Strichlinien ist in Bild 3 die erste Möglichkeit der Gestaltung dargestellt. Sie ist mit dem Grenzwert gf, bzw. smax verknüpft. Es ist φ = 90° und η ≈ 0,71. Mit Vollinien ist die zweite Möglichkeit erfaßt, und hier ist φ 93° und η ≈ 0,73. Die dritte, frei gewählte Möglichkeit schließlich, mit Punktstrichlinien erkennbar gemacht, liefert die Beträge φ ≈ 121° und η ≈ 0,89.
Aus diesen drei Ergebnissen lassen sich folgende Schlüsse ziehen:
1. Die normierte Frequenz η wächst mit wachsendem φ.
2. Die normierte Frequenz η wächst mit der Parallelverschiebung der den Betrag von XL darstellenden Hypotenuse zur imaginären Achse der Gaußschen Zahlenebene hin.
Die normierte Frequenz η wird größer, wenn XL kleiner wird.
3. Je kleiner die normierte Frequenz η ist, desto weiter ist sie von dem Punkt entfernt, wo auf der x-Achse der Durchlaßbereich DB in den Sperrbereich SB übergeht (Bild 5 - s. CQ DL 4/94, S. 246).
Der elementare (einstufige) π-Filter-Tiefpaß(27), um den es beim Kathoden-Schwingkreis für Gitterbasis-Senderverstärkergeht, hat als kleinstmögliche normierte Frequenz immer η ≈ 0,71, sodaß man festlegen kann: ηmin ≈ 0,71. In der Fachliteratur ist bislang darauf nicht hingewiesen worden.(8),(25),(27)
Es ist also hinzuzufügen:
4. Wenn φ = 90°, dann immer η ≈ 0,71, bei jedem Transformationsverhältnis mit beliebigen R1 und R2.
η ≈ 0,71 = ηmin.
Insgesamt besagen die vier soeben erwähnten Ergebnisse, daß die π-FilterTiefpässe die günstigsten sind, deren Phase pp 90° beträgt oder nur wenige Grad mehr. "Günstig" heißt hier: Die Steuerleistung, die sie zur Kathode einer in Gitterbasisschaltung betriebenen Senderöhre übertragen, wird in ihnen vergleichsweise am geringsten gedämpft.
Nur theoretisch unterliegt Steuerleistung, die einen Tiefpaß durchläuft, keiner Dämpfung(27). Da seine Komponenten nicht verlustfrei arbeiten können, der Tiefpaß selbst nicht mit seinem Wellenwiderstand abgeschlossen ist, kommt es zu Betriebsdämpfung, die mit stetig höher werdender Frequenz ungleichmäßig schwankt und ungefähr bei η = 0,8 stark ansteigt(25) (Bild 5).
Diesem Betriebsverhalten eines π-Filters entspringt die strikte Forderung, Kathodenschwingkreise so verlustarm wie irgend möglich zu gestalten: Trimmer-Drehkondensatoren mit Luft als Dielektrikum, auf keramischer Grundplatte; Festkondensatoren mit keramischem Dielektrikum; freitragende Spulen; ggf. Spulen auf Ringkern aus Pentacarbonyleisen...
Die Ortskurvenmethode zur Ermittlung von Xc1, Xc2 und XL eines π-Filter-Tiefpasses als reiner "Rechenvorgang nach einem bestimmten Schema"
Die "Berechnung" der drei Blindwiderstände von passiven, transform ieren-den, unsymmetrischen oder symmetrischen Vierpolen in π-Filter-Schaltung mit Hilfe des geometrischen Ortskurvenverfahrens kann auch rein rechnerisch durchgeführt werden, allein mit Hilfe der ebenen Trigonometrie, indem alle Schritte über Dreieckskonstruktionen erfolgen (Bild 6).
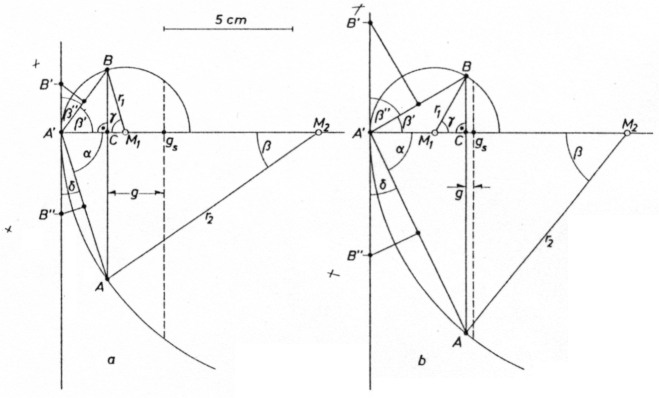
Bild 6: Aufgabe der beiden Abbildungen ist es, dem Leser anschaulich zu machen, welche Größen der ebenen Trigonometrie der Ortskurven-Darstellungen beim rein rechnerischen Ermitteln von Xc1, Xc2 und XL eines π-Filter-Tiefpasses eine Rolle spielen. Fall a: A'C < r1, Fall b: A'C > r1 (s. Text)
Man hat zwischen vier Ausgangsbedingungen zu unterscheiden, wenn es um die Berechnung von π-Filter-Tiefpässen geht. Die Ausgangsbedingungen hängen von der Größe g ab.
1. A'C = A'gs bzw. g = gs
2. A'C > r1, A'C > A'M1 bzw. gs - g > A'M1
3. A'C = r1, A'C = A'M1 bzw. gs - g = A'M1
4. A'C < r1, A'C < A'M1 bzw. gs - g < A'M1
Die Fälle 1 und 3 sind Grenzfälle: Der Fall 1 bedarf keiner längeren Berechnung, und der Fall 3 fügt sich, indem er sie in ihren ersten Schritten verkürzt, in die im folgenden beschriebene Methode der Berechnung ein.
Zum Fall 1: hier geht es um symmetrische Vierpole, die sich durch Xc1 = XL auszeichnen. Ist z. B. XL berechnet, entfällt die rechnerische Bestimmung von Xc1 und Xc2, wie an dieser Stelle wiederholt sei.
Es ist XL gleich dem geometrischen Mittel von R1 und R2, also
![]()
und damit ist der Weg frei für nur noch wenige, einfache Berechnungsschritte, mit denen L, C1 und C2 erfaßt werden. Im folgenden wird dargestellt, wie vorgegangen wird, wenn es sich um einen Fall 2 handelt, wenn also A'C > r1 (Bild 6 b).
Gegeben sind R1 und R2 und damit auch R1/2 und R2/2.
Berechnet wird gs und gewählt wird dann g.
Zum Beispiel werden die folgenden Faktoren festgelegt:
R1 = 50 Ω, r1 = 50/2 = 25, 25 ≡ 25 mm
R2 = 200 Ω, r2 = 200/2 = 100, 100 ≡ 100 mm
![]()
g sei 11 = 11 mm und daher A'C = 40 - 11 = 29 ≡ 29 mm
A'C > r1
M1C = A'C - r1 = 29 mm - 25 mm = 4 mm
Berechnung der Blindwiderstände:
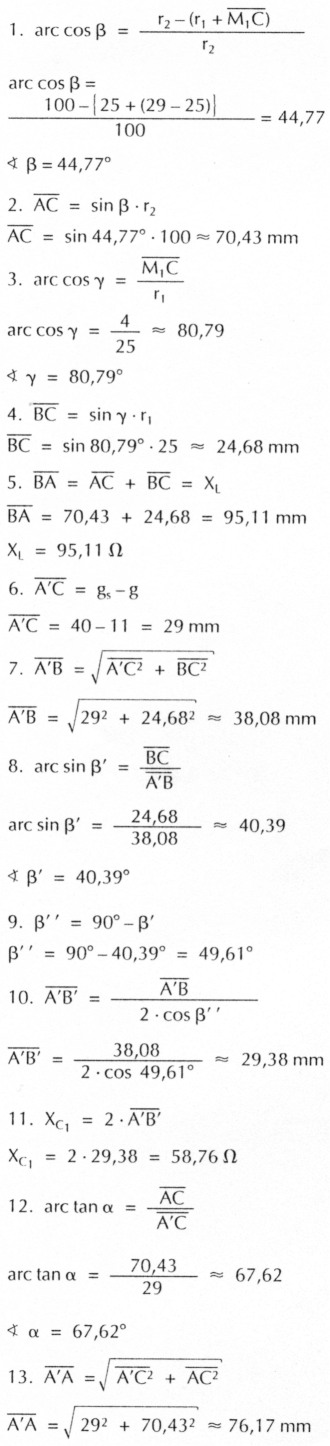
(Die im Rahmen der 16 Schritte der vorstehenden Berechnunggewonnenen Ergebnisse wurden absichtlich nicht auf ganze Zahlen auf- oder abgerundet, weil die Beträge für die Blindwiderstände des π-Filters im folgenden noch eine Rolle spielen werden; die dort angewendeten Methoden machen es sinnvoll, ausnahmsweise zwei Stellen nach dem Komma zu berücksichtigen.)
Wenn es sich bei einer Berechnung der soeben dargestellten Art um einen Fall 4, handelt, wenn also
![]()
dann ist
![]()
Bei Fällen des Typs 3 entfallen die Berechnungsschritte 3 und 4: der Schritt 3, weil y = 0, denn AB verläuft durch M1; der Schritt 4, weil BC = r1 (der Versuch einer Berechnung führt zu einer Multiplikation mit der Zahl 0). Da Schritt 2 zu AC führt, BC mit r1 vorgegeben ist, erhält man mit Schritt 5 den Betrag für XL mit AC + BC.
Kehren wir nun zu dem gegebenen und berechneten Beispiel zurück!
Es empfiehlt sich durchaus, die Probe zu machen, ob mit den berechneten drei Blindwiderständen die Transformation von 50 Ω auf 200 Ω erfolgt.
Eine derartige Kontrollrechnung erfolgt vom Ausgang des Vierpols, also von R2 her.
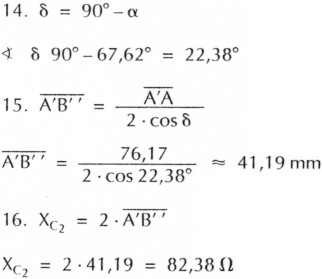
I. Als erstes sind Wirk- und Blindwiderstand zu berechnen, die aus der Parallelschaltung von R2 mit Xc2 hervorgehen. Dies geschieht z.B. mit Hilfe von Ortskurven (Bild 7)
Bild 7: Mit Hilfe einer üblichen Ortskurvenkonstruktion mit Halbkreis R2 auf der reellen und Halbkreis Xc2 auf der imaginären Achse werden Rr und Xr erfaßt. Das Viereck OM1ZM2 ist geometrisch ein gerader Drachen, in dem der Winkel OM2Z von M1M2 halbiert wird: α + α

Das Ergebnis lautet: Die Parallelschaltung R2||Xc2, 200 Ω||82,38 Ω ergibt Rr = 29,02 Ω als Wirkwiderstand und Xr = 70,44 Ω als Blindwiderstand.
II. Das Ergebnis der Reihenschaltung von XL = 95,11 Ω mit Rr = 29,02 Ω und Xr = 70,44 Ω ist nun berechenbar.
Komplexe Zahlen verwendend, lautet der Ansatz
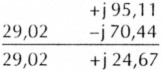
und man erhält den unverändert gebliebenen Wirkwiderstand Rr = 29,02 Ω und den Blindwiderstand Xr' = 24,67 Ω.
III. Mit Hilfe der Inversionsmethode wird die Berechnung fortgesetzt.
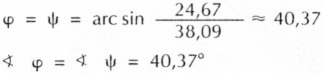
Auf der imaginären Achse einer Gaußschen Zahlenebene wird Xr' = 24,67 Ω und auf der reellen Achse Rr = 29,02 Ω eingetragen (Bild 8).

Bild 8: Grafische Darstellung der Inversionsmethode mit den komplexen Zeigern Z und Y. Der Weg zum gesuchten B, auf der imaginären und zum gesuchten Gr auf der rellen Achse verläuft über Z, φ, Y = 1 / Z und 1ψ = φ (s. Text)
Die Diagonale, die sich vom Nullpunkt 0 aus durch das von Rr und Xr' aufgespannte Rechteck erstreckt, ist der komplexe Zeiger Z.
Es ist
![]()
und hier ist also
![]()
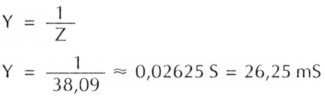
Benötigtwird der Betrag des Leitwertzeigers
![]()
der gleichfalls Diagonale eines Rechtecks ist, die mit der reellen Achse der Gaußschen Zahlenebene den gleichen Winkel beschreibt wie der komplexe Zeiger Z.
Um die zeichnerische Darstellung nicht verwirrend werden zu lassen, wird die Leitwert-Y-Diagonale unterhalb der reellen Achse konstruiert.
Der komplexe Zeiger Z bildet mit der reellen Achse den Winkel φ, der Leitwertzeiger mit ihr den Winkel ψ = φ.
Es ist
![]()
und daher
Es ist
Ferner ist

und

Mit dem Blindleitwert B, und mit dem Wirkleitwert G, spannt der Leitwertzeiger Y ein Rechteck auf.
(Um bei Anwendung der zeichnerischen Inversionsmethode hinreichend genau erm ittelte Beträge ablesen zu können - ggf. nach Abgreifen mit einem Stechzirkel -, ist es notwendig, die Einheitsstrecke vergleichsweise groß zu wählen [vergl. Bild 8]. Sehr bewährt hat sich der Maßstab 5 : 1, so daß sich ergibt: 5 mm ≡ 1 Ω.)
IV. Zum Schluß wird der Leitwert von Xc1 in die Berechnung einbezogen:
![]()
![]()
und über den Ansatz, der sich wieder komplexer Zahlen bedient
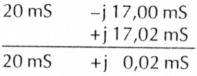
gelangt man mit
![]()
zu dem Endergebnis
![]()
Die rechnerische Erfassung des Zusammenwirkens der Komponenten des hier als willkürliches Beispiel verwendeten π-Filter-Tiefpasses - von R2 aus rückwärts zum Eingang hin gerichtet - beweist,daßervon R2 = 200 (lauf R1 = 50 Ω transformiert. In umgekehrter Richtung erfolgt die Aufwärtstransformation von R1 = 50 Ω auf R2 = 200 Ω mit gleicher Genauigkeit.
Daß der Wirkwiderstand R1 = 50 Ω des Tiefpaßeingangs mit 0,00002 S Blindwiderstand versehen ist, darf, ja muß tunlichst vernachlässigt werden: der Betrag ist verschwindend klein und befindet sich in dem numerischen Ungenauigkeitsbereich, der die Berechnung beeinflußt und beeinflussen darf; überdies geht die Berechnung davon aus, daß R1 und R2 reine Wirkwiderstände seien, was eine unzutreffende Idealisierung ist.
Daß R1 und R2 mit Blindwiderständen behaftet, also lmpedanzen sind, läßt sich im vorhinein schon darum nicht in der Berechnung quantitativ berücksichtigen, weil im allgemeinen einem Funkamateur nicht der Meßgerätepark zur Verfügung steht, mit dem erfaßt werden kann, was an die Stelle von R1 und R2 als Z1 und Z2 gesetzt werden muß.
Die Praxis zeigt, daß in der beschriebenen Weise berechnete Kathodenschwingkreise auf Anhieb vergleichsweise genau in dererforderlichen Weise funktionieren, und daß es genügt, sie vor oder nach dem Einbau in einen Senderverstärker einem Vor- oder Feinabgleich zu unterziehen.
Eine funkamateurgemaße Möglichkeit, einen π-Filter-Kathodenschwingkreis einem Vorabgleich zu unterziehen
Beim Verfasser hat sich ein "Anpassungssimulator" sehr bewährt, der aus einem KW-Transceiver und einem Stehwellenverhältnis-Meßgerät besteht (Bild 9).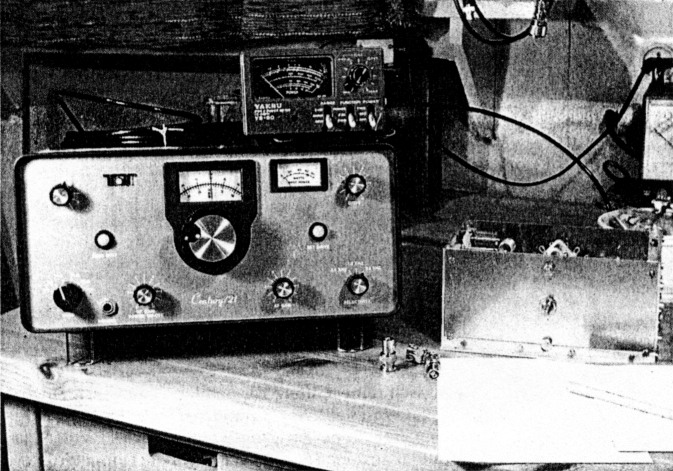
Bild 9: Geräteanordnung für den Vorabgleich von π-Filter-Tiefpässen. SG: Hochfrequenzgenerator, der es gestattet, die Ausgangsleistung bis zum Betrag Null zu verringern (P2). SWV: Stehwellenverhältnis-Meßgerät, mit dem Hochfrequenzgenerator über ein Koaxialkabel verbunden, dessen Wellenwiderstand ZL sowohl dem Ausgangswiderstand von SG, als auch dem Eingangswiderstand von SWV entspricht, im Regelfall also 50...53 Ω. Diese Bedingung gilt auch für die Verbindung von SWV und π-Filter C1, L, C2, das mit R2 = Re abgeschlossen ist. Trimmer-Drehkondensatoren (möglichst 150 pF) für C1 und C2 sind fest eingebaut, Festkondensatoren werden bei Bedarf parallelgeschaltet (s. Bild 12)
Der Hochfrequenzgenerator muß einen 50...53-Ω-Ausgang haben und unbedingt die Möglichkeit bieten, die Ausgangsleistung auf P2 = 0 zu reduzieren. Zur Verbindung zwischen den Geräten werden möglichst lange, industriell konfektionierte 50... 53-Ω-Kabel verwendet.
R2 kann ohne weiteres mit handelsüblichen, induktivitätsarmen Metallschicht-widerständen, Toleranz 1 %, axiale Anschlüsse, ggf. in Reihen- oder Parallelschaltung, simuliert werden. Hohe Belastbarkeit des Widerstands bzw. der Widerstände ist nicht erforderlich, denn die Messungen erfolgen mit gerade so viel Steuerleistung, daß in der Schalterstellung "eichen" bzw. "calibrate" des SWV-Meßgerätes Vollausschlag des Meßinstrumentes genau einstellbar ist.
Der Widerstand bzw. die Widerstände werden auf einem passenden Koaxialstecker montiert, mit gekürzten Anschlußdrähten; so ist es ein leichtes, Widerstände zu wechseln, ohnedaß das π-Filter ausgebaut werden muß.
Auf dem Meßbereich des SWV-Meßgerätes für die geringste Ausgangsleistung eines Senderverstärkers wird in der Schalterstellung "eichen" auf der jeweiligen Bandmittefrequenz die Ausgangsleistung des Hochfrequenzgenerators sachte (!) hochgeregelt. Dann wird auf "SWV" bzw. "SWR" umgeschaltet und - wenn erforderlich - durch Veränderung von C1 und/oder C2 (Bild 9) versucht, das Stehwellenverhältnis 1 : 1, also Linksanschlag des Meßinstrumentenzeigers, zu erreichen.
Wenn die Berechnung von C1, C2 und L fehlerfrei gewesen ist, R1 und R2 den Vorgaben entsprechen, L richtig dimensioniert wurde(11), C1 und C2 ihre Sollwerte haben oder-am besten-mit Hilfe von Trimmer-Drehkondensatoren (Bild 9) veränderbar sind, findet man überraschend schnell die Einstellungen der beiden Kapazitäten, bei denen keine Reflexion nachweisbar ist. Man versäume nicht, auf das nächst "höhere" KW-Band umzuschalten: dort - C1 und C2 werden nicht verändert! - tritt schon starke Reflexion auf, da die Frequenz schon im Sperrbereich liegt.
Ein nicht ungefährliches Vorhaben: der Endabgleich im Senderverstärker
Besonders günstig ist es, das Kathodenkreise-System für einen All- bzw. Mehrband-Senderverstärker in einer Baugruppezusammenzufassen, die nach erfolgtem Vorabgleich in das Chassis des Senderverstärkers eingefügt wird (Bild 10).
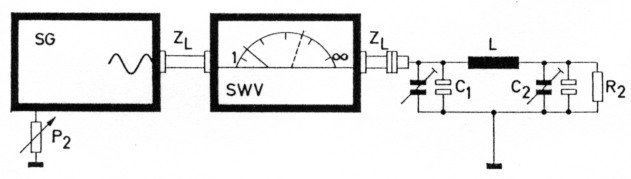
Bild 10: So hat der Verfasser den π-Filter-Meßplatz zusammengestellt: "Century/ 21" (Ten-Tec) als Hochfrequenzgenerator und ein "YS-60"-Stehwellenmeßgerät (YAESU). In dem Gehäuse rechts im Bild befinden sich, umschaltbar, fünf Kathodenschwingkreise, für die fünf herkömmlichen KW-Amateurfunkbänder (s. Bild 12); das Gehäuse hat die Abmessungen 185 x 105x 90 mm und wurde aus 2 mm dickem, hartem Aluminiumblech gestaltet. Es paßt ins Innere des Chassis, unmittelbar neben der Röhrenfassung montiert. Das Koaxialkabel zwischen "YS-60" und π-Filter ist mehrere Meter lang. Zwischen "Century/21"und π-Filter liegen einige industriell gefertigte Abschlußwiderstände, in BNC-Stecker eingebaut.
Der unverzichtbare Endabgleich des Kathodenkreises muß im betriebsbereiten Senderverstärker vorgenommen werden.
Untergar keinen Umständen darf dasgetan werden, ohne dem Senderverstärker alle erforderlichen Betriebsspannungen zuzuführen, ja er muß für Vollastbetrieb vorbereitet sein. Denn würde man ihn ohne Anodenspannung endabgleichen, würde das Steuergitter durch Überlastung irreparablen Schaden erleiden.
Doch nicht nur das! Der Endabgleich wäregar keiner, weil der Eingangswiderstand Re der Röhre von ihrem Arbeitswiderstand RA mitbestimmt wird (Bild 11).
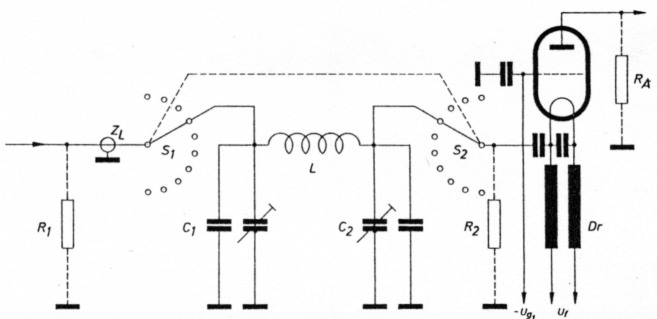
Bild 11: Schaltplan der Eingangsseite eines Gitterbasis-Senderverstärkers für mehrere KW-Amateurfunkbänder. Ein einschaltbarer Kathodenschwingkreis ist dargestellt: C1, L und C2. R1 ist der Eingangs-, R2 der Ausgangswiderstand des π-Filters, und R2 = Re der Röhre. Dr ist eine bifilar auf einen Ferritstab gewickelte Doppeldrossel in der Zuführung der Heizspannung Uf. Der Arbeitswiderstand RA der Röhre ist dargestellt, weil er den Eingangswiderstand Re beeinflußt (s. Text). Die Kapazitäten, die die Steuerleistung an die Kathode übertragen, müssen so groß sein, daß ihr Blindwiderstand Xc auch noch im 80-m-Band vergleichsweise klein ist; 2000 pF sind angebracht. Gleiches gilt für die Kondensatoren, die das Steuergitter für Hochfrequenz mit Masse verbinden, falls die Röhre mit Gittervorspannung -Ug, betrieben wird oder betrieben werden muß.
Es versteht sich von selbst, daß der Senderverstärker während des Endabgleichs an eine künstliche Antenne ("dummy load") angeschlossen bleibt.
Während des Endabgleichs ist höchste Vorsicht geboten. Es kann nicht oft genug betont werden, daß die Anodenspannung lebensgefährlich ist.
Der Kathodenkreisbereich muß - bei strahlend heller Beleuchtung - frei zugänglich sein, und klug ist es immer, bei solcher Tätigkeit eine Hand in der Hosentasche zu belassen. Einen Beobachter des Geschehens in der Nähe zu haben, kann einer Lebensversicherung gleichkommen! (Wo ist der Hauptschalter? Im Notfall den Betroffenen nurdurch Ziehen an seiner Kleidung von der tödlichen Gefahrenquelle befreien!)
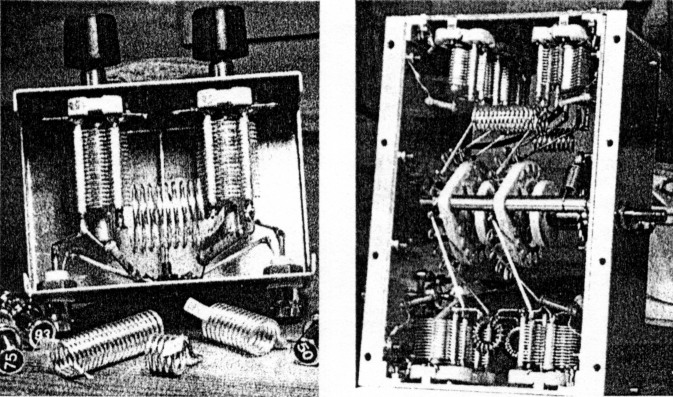
Bild 12: Links: berechnete π-Filter-Tiefpässe baut der Verfasser zum Erproben in einem gängigen, genormten Gehäuseoberteil auf, das 105 x 70 x 40 mm mißt. Zwei 150-pF-Trimmer-Drehkondensatoren sind fest eingebaut und zwei BNC-Buchsen. Im Laufe der Zeit erhält man zwangsläufig eine Sammlung von Spulen. Rechts: Innenansicht des 5-Band-Kathodenkreise-Systems, das in Bild 10 zu erkennen ist. Oben sind freitragende Spulen fürs 10-,15- und 20-m-Band zu sehen, unten Ringkernspulen fürs 40- und 80-m-Band (T-68-2-Ringkerne, Amidon). Der robuste Drehschalter hat in Keramik eingelassene Kontakte (Typ 78, Radio Switch Corporation, USA). In der linken Wand des Gehäuses ist, zentral, der Durchbruch für die Zuführung der Steuerleistung zur Kathode. 100-pF-Trimmer-Drehkondensatoren sind eingebaut
Zwischenmenschlich Wichtiges zum Schluß
Einer Reihe von hilfsbereiten Fachleuten verdankt der Verfasser wichtige Hinweise aufdie Lösungvon Problemen, die die Vierpoltheorie aufwirft.
Diesen Mitwirkenden ist der Verfasser zu großem Dank verpflichtet: K. Weber, Dipl.-Ing., Telefunken, Berlin; H. G. Nöller, Prof. Dr., Universität Bonn; E. Döring, Prof. Dipl.-Ing., Fachhochschule Hannover; R. B. Stevens, Winchester NH, USA; H. H. Götting, Röddensen; Jutta Schneider, Dipl-Ing., Technische Universität, Braunschweig; K. Lange, Prof. Dr.-Ing., Universität der Bundeswehr, München; W. Weißgerber, Prof. Dr.-Ing., Fachhochschule Hannover; D. Schmidt, Prof. Dr., Universität (GH) Essen.
Teil 1 - Teil 2 - Teil 3 - Teil 4 - Teil 5 - Teil 6 - Teil 7 - Teil 7a - Teil 8 - Teil 9
DL3FM, Prof. Dr. Karl Lickfeld.