Praktische filtertechniek 1; Inleiding
Elektrische en elektronische filters zijn onderwerpen die voor de meeste hobbyisten (en ook veel elektronici) vrij ondoorzichtig zijn.
Zowel de werking als de berekening van een filter zijn zaken die men niet goed doorschouwt, met als gevolg dat vaak naar standaard-oplossingen wordt gegrepen en fouten moeilijk opgespoord kunnen worden. Met een reeks artikelen over de werking en berekening van de meest voorkomende filtertypen wil Elektuur trachten de filtertechniek voor iedereen begrijpelijk te maken.
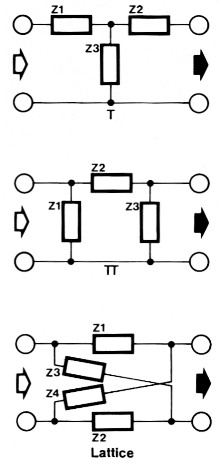
Figuur 1. Enkele vormen van passieve filternetwerken: een T-, een π- en een lattice-filter.
Elektrische filters worden in de elektronica in ruime mate toegepast. Er is haast geen elektronisch apparaat te bedenken waar niet een of andere vorm van filtering in wordt toegepast. In audioschakelingen, luidsprekerboxen, radio's, TV's, radar, voor elke specifieke toepassing kan wel een speciaal filter worden ontworpen. De grenzen hierbij worden voornamelijk bepaald door de grootte en komplexiteit van de filterschakeling. Men kan filters op verschillende manieren in groepen verdelen. Er kan worden uitgegaan van de toegepaste konfiguratie en dan wordt gesproken over laddernetwerken (in de vorm van een T of π) en lattice-netwerken (figuur 1). Voor de laatste is geen echte Nederlandse naam die de lading goed dekt, maar het komt erop neer dat kruislings over de seriekomponenten nog eens twee komponenten zijn geplaatst.
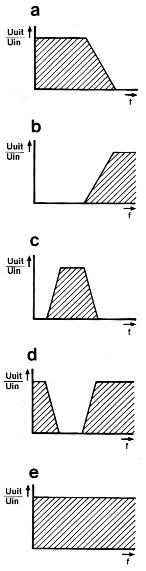
Figuur 2. De diverse filtertypen: a. laagdoorlaat; b. hoogdoorlaat; c. banddoorlaat; d. bandsper; e. all-pass.
We kunnen ook een indeling maken aan de hand van de toegepaste elementen: passieve filters (LC-, RL- en RC-netwerken, of bijvoorbeeld een strip-line of keramische resonator) en aktieve filters (waarin een aktieve komponent is opgenomen die ook werkelijk een aktieve rol speelt in het filter).
Het voorgaande geeft een soort "fysieke" indeling. Waar het echter gewoonlijk om gaat, is niet zozeer de konstruktie (een filterfunktie kan op verschillende manieren gerealiseerd worden), maar om de werking van het filter. Deze indeling, waar verder steeds mee gewerkt zal worden, zullen we nu eens gaan bekijken.
De basistypen
Er zijn vijf basistypen van filters:
- Het laagdoorlaatfilter (figuur 2a). Dit filter laat alle signalen door vanaf gelijkspanning tot een bepaalde frekwentie, die kan-telpunt, kantelfrekwentie of grensfrekwentie wordt genoemd. Boven deze f rekwentie worden de signalen slechts gedeeltelijk of helemaal niet meer doorgelaten.
- Het hoogdoorlaatfilter (figuur 2b). Beneden een bepaalde frekwentie worden de elektrische signalen geheel of gedeeltelijk geblokkeerd. Boven dit punt worden alle elektrische signalen gewoon doorgegeven van ingang naar uitgang.
- Het banddoorlaatfilter (figuur 2c) geeft slechts een beperkt gebied tussen twee frekwenties door, dat afhankelijk van de filteropzet heel breed of heel smal kan zijn. Dit is het meest voorkomende filtertype in de elektronica.
- Het bandsperfilter (figuur 2d) heeft een blokkerende werking in een gebied dat door twee frekwenties begrensd wordt. Daarbuiten worden alle signalen ongehinderd doorgelaten.
- Tenslotte hebben we nog het allpass-filter (vrij vertaald: alles-doorlaat-filter), dat precies doet wat zijn naam aanduidt: alle frekwenties worden onverzwakt doorgegeven, maar er wordt een faseverschuiving geïntroduceerd die afhankelijk is van de filterdimensionering. Eigenlijk is de naam "filter" hierbij dus niet helemaal op zijn plaats, aangezien er niet echt gefilterd wordt in het frekwentiedomein.
Met uitzondering van de allpass-filters kunnen alle filters in feite berekend worden uit de gegevens voor het laagdoorlaatfilter, zoals we later zullen zien. In dit deel zullen verder nog enkele algemene filter-zaken bekeken worden.
Het ideale filter
Een ideaal filter is een filter dat alle frekwenties binnen een of twee grenswaarden onverzwakt doorlaat en daarbuiten een oneindig hoge verzwakking geeft. De helling van het ideale laagdoorlaatfilter in figuur 3 is een zuiver vertikale lijn. Een ideaal filter zal verder een zekere tijdvertraging tussen in- en uitgang geven die konstant is bij elke frekwentie. In figuur 3 is dat dan ook aangegeven met een horizontale lijn. Uit deze twee kurves volgt ook automatisch de kurve voor de ideale faseverschuiving: dat wordt een rechte helling. De tijdvertraging t bij een zekere hoeksnelheid ω (= 2πf) of frekwentie f kan namelijk worden afgeleid uit de faseverschuiving bij elke frekwentie:
t = ω/f (waarbij cp de faseverschuiving in graden is), of:
t = β/ω (waarbij β de faseverschuiving in radialen is). Let er op dat de frekwentieschaal in figuur 3 lineair is, bij de gebruikelijke logaritmische schaal ziet de fase-kurve er heel anders uit!
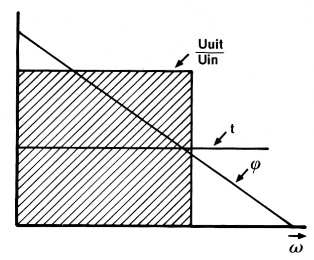
Figuur 3. Zo ziet de karakteristiek van het ideale laagdoorlaatfilter er uit: Een oneindig steile helling en een konstante tijdvertraging over het hele frekwentiebereik.
Het zojuist beschreven ideale filter is in de praktijk niet te realiseren, zodat de hellingen dus niet meer oneindig steil zijn en de optredende tijdvertraging niet bij elke frekwentie hetzelfde is. Hiermee dient men bij de keuze van het filter terdege rekening te houden, aangezien door de afwijkingen t.ov. het ideaal afwijkingen in het stap- en impulsgedrag ontstaan.
Een beetje netwerktheorie
Een algemene filter-opzet is getekend in figuur 4. Het filterblok kan spoelen, kondensatoren, weerstanden en aktieve elementen bevatten. Op de ingang is een spanningsbron aangesloten met een inwendige weerstand Ri en de uitgang is afgesloten met een belastingsweerstand Rb.
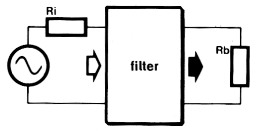
Figuur 4. De algemene opzet van een filterblok met de bron- en belastingsweerstand.
De twee weerstanden in deze tekening beinvloeden in sterke mate de werking van het filter. Bij het ontwerpen van een filter zullen deze waarden in de meeste gevallen bekend moeten zijn (bij het gebruik van buffers aan in- en uitgang kan de werking van het filter onafhankelijk van de bron en belasting worden gemaakt). We geven twee voorbeelden: bij een luidsprekerfilter zal de inwendige bron-weerstand praktisch nul zijn en de belastingsweerstand een waarde van bijvoorbeeld 6 Q hebben. Bij een hoogfrekwent-filter zullen beide weerstanden een waarde van bijvoorbeeld 60 Q hebben. Dat geeft heel verschillende uitgangspunten voor de dimensionering van een filter. De overdrachtsfunktie van een filter kan worden gegeven als een breuk van twee komplexe vergelijkingen. Nemen we als voorbeeld het eenvoudige filter uit figuur 5, dan luidt de overdrachtsfunktie:

De noemer bestaat uit een derde-orde vergelijking en dat houdt in dat we hier te maken hebben met een derde-orde-filter. De wortels van de noemer worden de polen genoemd en de wortels van de teller de nulpunten van de overdrachtsfunktie (in dit geval verder niet interessant, aangezien de teller hier 1 is). De polen en nulpunten bepalen samen het verloop van het filter. Worden deze opgegeven, dan weet men precies wat het filter doet en kunnen ook de komponentenwaarden voor een bepaalde filteropzet worden berekend. De komplexe wortels van teller en noemer kunnen in het komplexe vlak worden afgebeeld in de algemeen gebruikelijke vorm van kruisjes (voor polen) en bolletjes (voor nulpunten). Figuur 5 toont dit voor de gegeven funktie.
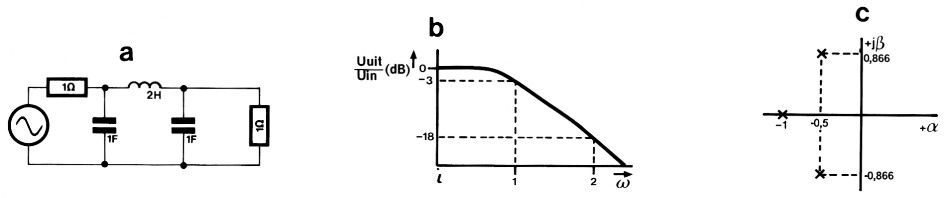
Figuur 5. Een voorbeeld van een filter (a) met de daarbij behorende overdrachtskarakteristiek (b). De polen van de overdrachtsfunktie zijn in het komplexe vlak (c) afgebeeld als enkele kruisjes.
De plaats van de polen en nulpunten in het komplexe vlak bepaalt de stabiliteit van het filter en de praktische realiseerbaarheid. We gaan er hier niet verder op in, maar het is wel interessant om te weten dat de polen en nulpunten voorkomen in paartjes die de gekonjugeerde van elkaar zijn. Alleen polen en nulpunten die op de reële as liggen, kunnen in enkelvoud voorkomen. Verder mogen polen alleen in de linker helft van het komplexe vlak liggen.
De steilheid van een n-de orde filter is in het algemeen n × 6 dB per oktaaf. Dit is slechts een richtlijn en hangt af van het filtertype. Ook de fasedraaiing bij het kaneelpunt (-3-dB-punt) kan met zo'n vuistregel worden bepaald, namelijk n × 45°. Houd er echter rekening mee dat hierin behoorlijke afwijkingen kunnen zitten bij de verschillende typen.
De moderne netwerktheorieën hebben ons een aantal standaard-families van filters opgeleverd met elk hun specifieke eigenschappen, zoals Butterworth, Chebychev en Bessel. Aangezien het bij de hogere-orde-overdrachtsfunkties erg moeilijk wordt om daar zelf voor een bepaalde familie de polen en nulpunten van te berekenen, kan men hiervoor zijn toevlucht nemen tot tabellen waarin deze worden gegeven. Verschillende onderzoekers hebben hierop in het verleden hun rekenkunsten (en vaak uitgebreide computersystemen) losgelaten, zodat we in staat zijn op eenvoudige wijze met behulp van een aantal tabellen een praktisch filter te berekenen.
De opzet van de serie
In de volgende delen van deze serie zullen we een aantal standaard-filtertopologieën geven (zowel passief als aktief). Vervolgens komen de diverse filtertypen aan bod, waarbij steeds de belangrijkste karakteristieken zullen worden gegeven met tabellen voor de polen en de komponentenwaarden voor de diverse netwerken. Voor de passieve netwerken zullen waarden worden gegeven voor bron-impedanties die gelijk zijn aan de belastingsimpedanties, en waarden voor bronimpedanties van nul ohm, zodat zowel de audio-liefhebber als de hoogfrekwent-hobbyist hiermee in de meeste gevallen uit de voeten kan.
Voor alle berekeningen wordt uitgegaan van een laagdoorlaatfilter. Alle andere typen kunnen hieruit worden afgeleid. Voorbeelden hierbij zullen de werkwijze verduidelijken.
Alle bij de filtertypen afgedrukte karakteristieken zijn met behulp van een netwerk-analyse-programma berekend, zodat deze een hoge mate van nauwkeurigheid hebben. In de meeste gevallen zal men voldoende hebben aan deze karakteristieken om voor een bepaald doel een bijpassend filter te vinden.
Tot zover deze inleiding. De volgende maand zullen we de filtereigenschappen bekijken aan de hand van de verschillende karakteristieken.
Deel 1 - Deel 2 - Deel 3 - Deel 4 - Deel 5 - Deel 6 - Deel 7 - Deel 8 - Deel 9 - Deel 10