Praktische filtertechniek 2; De filterkarakteristieken
Elk filter heeft zijn typische eigenschappen. Deze kunnen worden vastgelegd in enkele karakteristieken. Wat die allemaal laten zien en waar men op moet letten bij het bekijken, wordt in dit tweede deel besproken.
Er zijn verschillende parameters die de eigenschappen van een filter karakteriseren. De meest gebruikelijke is de frekwentiekarakteristiek. De ontwerper van een schakeling stelt gewoonlijk bepaalde eisen aan de rimpel in de door-laatband en de steilheid van de filterhellingen en hij zal dan een keus moeten maken uit een aantal mogelijkheden. Het type filter, hoogdoorlaat, banddoorlaat etc., is hierbij niet van belang. Elk type kan getransformeerd worden in een standaard-laagdoorlaatfilter met een kantel-punt van 1 Hz. Men dient eerst zijn filter-eisen om te werken tot zo'n genormaliseerde laagdoorlaat-specifikatie en dan kunnen deze vergeleken worden met de beschikbare filterkurves die ook allemaal genormaliseerd zijn op 1 Hz. Nadat een keuze is gemaakt, kan het filter vrij eenvoudig worden getransformeerd en gedimensioneerd voor de gewenste frekwentie(s). Er zijn een aantal filterfamilies met elk hun specifieke eigenschappen, waaruit de ontwerper een keus kan maken:
- Butterworth-filters
- Bessel-filters
- Chebyshev-filters
- Transitie-filters
- Lineaire-fase-filters
- Synchroon afgestemde filters
- Elliptische (of Cauer-)filters
Met uitzondering van de elliptische filters zijn de frekwentiekarakteristieken van deze families allemaal genormaliseerd op een -3-dB-punt bij 1 Hz. Dat houdt in dat men deze kurves kan transformeren naar elke frekwentie f door bij de filterberekening een schaalvermenigvuldigingsfaktor in te voeren die gelijk is aan f.
De filtereigenschappen
Als voorbeeld voor de werking van een filter is hier het eenvoudigste filter genomen dat bestaat, een RC-netwerk (figuur 1). Dit netwerk wordt gevoed vanuit een spanningsbron met inwendige weerstand van nul Q en het wordt belast met een oneindig hoge weerstand.
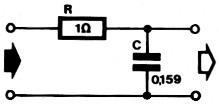
Figuur 1. Als voorbeeld is een eenvoudig RC-filter genomen met een gestandaardiseerd -3-dB-punt op 1 Hz.
![]()
De absolute waarde van deze breuk (die de frekwentiekarakteristiek bepaalt) is:
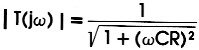
De optredende faseverschuiving is:
φ = -atan(ω × RC)
Met het nodige rekenwerk kunnen we uit de laatste twee formules de zogenaamde bode-diagrammen halen, de welbekende frekwentiekarakteristiek en fasekarakteristiek. Voordat we dat doen, willen nog even laten zien wat zo'n netwerk doet als de beide karakteristieken op een lineaire frekwentieschaal worden uitgezet. Er is bij de frekwentiekurve (figuur 2) dan niets terug te vinden van de mooie rechte helling die men anders ziet. We willen hiermee even demonstreren dat die rechte lijn alleen maar mogelijk is door een logaritmische schaal te kiezen. Dan verloopt de verzwakking bij de gekozen grootheden lineair (de verzwakking kan dan in zoveel dB's per oktaaf - frekwentieverdubbeling - of dekade - de tienvoudige frekwentie - worden opgegeven). De verzwakking gaat in werkelijkheid dus niet mooi geleidelijk, maar loopt via een kromme.
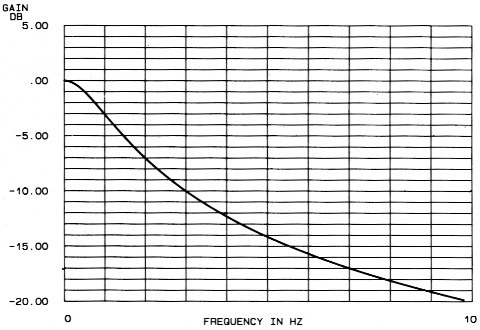
Figuur 2. Zo ziet de frekwentiekurve van het filter er uit als een lineaire frekwentieschaal wordt genomen.
De fasekarakteristiek toont ons op een lineaire schaal wel iets belangrijks (figuur 3), namelijk hoe goed de filterfunktie de voorwaarde benadert die nodig is om geen groepslooptijdvervorming te introduceren (φ/f = konstant). Dat moet, als het goed is, bij een lineaire frekwentieschaal een hellende, maar wel rechte lijn geven. Bij een logaritmische verdeling is dat eigenlijk niet meer te beoordelen.
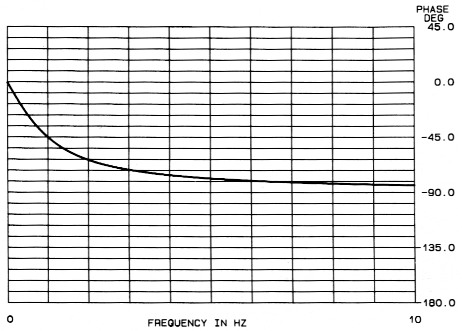
Figuur 3. Bij gebruik van een lineaire frekwentieverdeling voor de fasekarakteristiek kan men zich een goed idee vormen van de door het filter veroorzaakte looptijd-afwijkingen.
Een ander punt waar zeker iets over verteld moet worden, is de ingangsimpedantie van het filter. Menige hobbyist heeft wel eens verschillende filtersekties achter elkaar gehangen in de hoop zo een steiler filter te krijgen, maar de resultaten waren altijd bedroevend. Aangezien de impedantie van de frekwentieafhankelijke komponenten in een filter verandert met de aangeboden frekwentie, zal de ingangsimpedantie ook veranderen (zie figuur 4, die de ingangsimpedantie van ons eenvoudige RC-netwerkje toont). Een filter wordt altijd berekend voor een vaste ohm-se belasting. Hangt men nu een filter op de plaats van de belastingsweerstand, dan is die belasting plotseling frekwentie-afhankelijk geworden en dan klopt er niets meer van de oorspronkelijke werking.
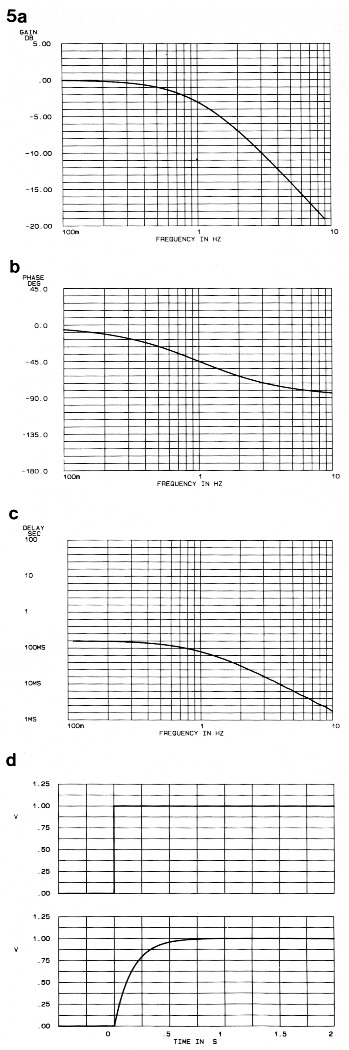
Figuur 5. De standaardkarakteristieken zoals die voor alle toekomstige filters zullen worden aangehouden:
a. frekwentiekarakteristiek
b. fasekarakteristiek
c. tijdvertraging t
d. stapresponsie.
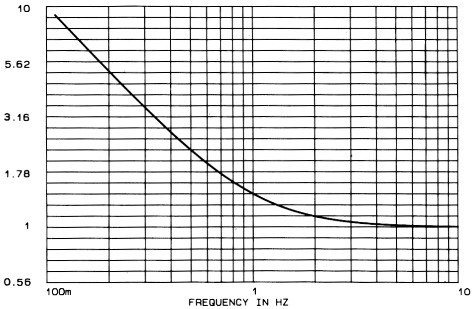
Figuur 4. De ingangsimpedantie van het RC-netwerkje is niet konstant, maar loopt op bij lage frekwenties.
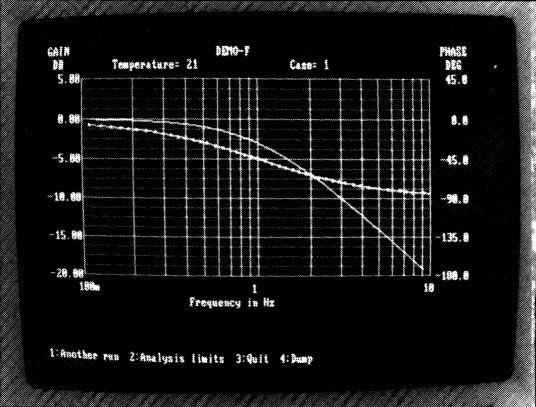
Na dit korte uitstapje gaan we weer terug naar de "normale" kurves. Omdat frekwentie- en fasekurve meestal in een logaritmische karakteristiek (of twee onder elkaar getekende karakteristieken) worden getekend, zal het faseverloop niet veel zeggen over de te verwachten tijdvertraging. Om het verloop van de optredende tijdvertraging in het filter toch te kunnen beoordelen, wordt vaak een aparte tijdvertragingskarakteristiek toegevoegd (eenvoudig te berekenen uit de fase- en frekwentiekurve). Tot slot is voor veel toepassingen de stap-responsie nog van belang. Dit is de reaktie van het filter op een spanningssprong die op de ingang wordt gezet. Daarmee komen we op een totaal van 4 plaatjes die praktisch alle informatie over een filter bevatten.
De standaardkurves
In figuur 5 zijn de standaard-kurves afgebeeld voor ons RC-voorbeeld. Voor alle filterfamilies zullen dergelijke kurves worden gegeven, zodat men een duidelijk overzicht heeft van alle mogelijkheden. Ook zullen we trachten zoveel mogelijk dezelfde schaalverdelingen aan te houden, zodat de kurves direkt met elkaar vergeleken kunnen worden. Alle karakteristieken zijn berekend met een netwerkanalyseprogramma om een zo nauwkeurig mogelijke weergave te realiseren. Alles is genormaliseerd op een kantelpunt van 1 Hz. De bovenste figuren (a en b) spreken voor zich: de frekwentie- en fase-karakteristiek. Figuur 5c geeft de tijdvertraging die berekend is uit de eerste twee karakteristieken. Tenslotte toont figuur 5d de stapresponsie van het filter. Boven ziet u het ingangssignaal, een spanningsstap van 1 V, en beneden het resultaat aan de uitgang. Bij de karakteristieken in de volgende afleveringen zal die ingangsspanning niet meer worden afgebeeld, aangezien deze altijd gelijk is aan de hier getoonde. Het stapgedrag zegt bij dit filter natuurlijk vrij weinig, omdat dit zo eenvoudig is. Bij komplexere filters (tweede orde en hoger) kan men in dit plaatje meteen zien of er sprake is van een inslingergedrag, hoe lang dit duurt en hoe groot de "overshoot" is.
Een klein rekenvoorbeeld
Aan het einde van dit tweede deel willen we nog een rekenvoorbeeld geven om te laten zien hoe de dimensionering van een filter met deze werkwijze plaatsvindt. Stel dat we een RC-netwerkje moeten hebben zoals in figuur 1, dat wordt gevoed vanuit een vrij laagohmige spanningsbron en wordt afgesloten met een hoge weerstandswaarde (> 1 MΩ). Het kantelpunt moet op 3 kHz komen te liggen (dus de schaalvermenigvuldigingsfaktor f = 3000). In dit geval kunnen we vrij een weerstandswaarde voor R kiezen, bijvoorbeeld 10 kΩ. Alle kondensatorwaarden in het genormaliseerde schema worden gedeeld door de weerstandswaarde en de schaalvermenigvuldigingsfaktor, en alle spoelwaarden worden vermenigvuldigd met de weerstandswaarde en daarna gedeeld door de schaalvermenigvuldigingsfaktor. In dit geval is er slechts een kondensator, waarvan de waarde dan wordt:
C = 0,159/(f x R)
C = 0,159/(3000 × 10000)
C = 5,3×10-9 F = 5,3 nF
De tijdvertraging bij een bepaalde frekwentie kan berekend worden door de tijdvertraging bij die frekwentie af te lezen in figuur 5c en die waarde door de schaalvermenigvuldigingsfaktor f te delen. Hetzelfde geldt voor de tijdschaal bij de stapresponsie. Gewoonlijk worden alle filterkomponenten berekend aan de hand van de gewenste kantelfrekwentie en de bron- of belastingsweerstand. Aangezien deze laatste in het voorbeeld niet aanwezig zijn, kan de enige weerstand in het filter hiervoor genomen worden.
Tot zover de filter-eigenschappen. De volgende maand gaan we verder met de mogelijke passieve en aktieve filterkonfiguraties.
Deel 1 - Deel 2 - Deel 3 - Deel 4 - Deel 5 - Deel 6 - Deel 7 - Deel 8 - Deel 9 - Deel 10